Themen
Sensorbasierte Hacksysteme
Das ideale Hackverfahren hat eine hohe Arbeitsqualität bei gleichzeitig hoher Arbeitsleistung und lässt sich durch eine einzelne Person durchführen, die durch die Technik von der Hackgerätesteuerung entlastet wird. Dies reduziert die Arbeitskosten sowie den Herbizideinsatz.
In Zukunft werden vermehrt autonome Roboter zur mechanischen Unkrautbekämpfung auf den Markt kommen.

Überblick
Das Hacken von Reihenkulturen war bis zur Einführung von Herbiziden eines der Standardverfahren zur Unkrautkontrolle. Aus verfahrenstechnischen und arbeitswirtschaftlichen Gründen verschwanden die Hackgeräte von den meisten Betrieben. Im Vergleich zur Pflanzenschutzmittelapplikation ist das Pflegezeitfenster für eine Bearbeitung des Bodens kleiner, die Flächenleistung aufgrund geringerer Arbeitsbreiten niedriger und der Arbeitszeitbedarf, vor allem wenn eine zusätzliche Person zum Steuern des Hackgerätes benötigt wird, wesentlich höher. Lange Zeit hackten nur noch biologisch wirtschaftende Betriebe. Das Arbeitsverfahren hat vor dem Hintergrund herbizidresistenter Unkräuter, der Verringerung zugelassener Pflanzenschutzwirkstoffe sowie wegen des Gewässerschutzes an Bedeutung gewonnen. Für eine arbeitseffiziente Durchführung stehen sensor- und satellitenbasierte Steuerungen und Lenksysteme zur Verfügung, welche die Leistungsfähigkeit des Verfahrens steigern und die Arbeitskosten senken.

Sensorbasiertes Hacken in Reihenkulturen (© Agrofutura, Martin Holp)
Anwendungsgebiete und Vorteile
- Mechanische Unkrautkontrolle mit hoher Flächenleistung in Reihenkulturen wie Mais, Zuckerrüben, Sonnenblumen, Soja, Gemüse
- Sensorbasierte Steuerung der Hackwerkzeuge ermöglicht Hacken zwischen den Pflanzenreihen und innerhalb der Reihe zwischen den Pflanzen
- Kombination des Hackens mit Bandspritzung ist möglich, dadurch werden je nach Kultur und Reihenabstand bis zu ⅔ weniger Pflanzenschutzmittel appliziert
- Hacken auch innerhalb der Reihe ermöglicht einen kompletten Herbizidverzicht
Technologieüberblick
Das ideale Hackverfahren hat eine hohe Arbeitsqualität bei gleichzeitig hoher Arbeitsleistung und lässt sich durch eine einzelne Person durchführen, die durch die Technik von der Hackgerätesteuerung entlastet wird. Hierfür werden kamera-, satelliten- und ultraschallgesteuerte Hackgeräte angeboten. Diese sind in der Regel an einen hydraulisch angelenkten Querverschieberahmen angebaut, der die Hackwerkzeuge präzise an der Pflanzenreihe entlangführt.
Kamerabasierte Steuerung
Bei den Kameras decken drei Hersteller einen Grossteil des Marktes ab. Das Claas-System wird über die verschiedenen Hackgeräteanbieter vertrieben, Schmotzer und Garford haben auch eigene Systeme im Angebot. Die Geräte funktionieren nach demselben Grundprinzip: Die Kamera hat eine bis mehrere Pflanzenreihen im Sichtfeld, analysiert deren Verlauf und steuert den Querverschieberahmen. Die Fahrgeschwindigkeiten können 10 Stundenkilometer übersteigen (Abb. 1 und 2). Die Regelungsqualität hängt stark von der Sichtbarkeit der Reihen ab. Die Pflanzen müssen eine minimale Grösse haben, damit die Kameras sie erkennen. Lange Fehlstellen auf den detektierten Pflanzenreihen sowie starke Verunkrautung führen zu einer unzuverlässigen Reihenerfassung. Seitenwind und geringe Beleuchtung können die Regelungsgenauigkeit zusätzlich beinträchtigen. Es ist also auch mit Kamerasteuerungen wichtig, die Bearbeitung im richtigen Zeitfenster durchzuführen. Im Gegensatz zur manuellen Steuerung können mittels mehrerer Kameras mehrere Säarbeitsbreiten gleichzeitig gehackt werden (Abb. 3).


Die Kamera detektiert zwei Pflanzenreihen und steuert den Querverschieberahmen dynamisch nach.

Spezialanwendung: Kamerahacken innerhalb der Reihe
Neben Steuerungen für das Hacken zwischen den Pflanzenreihen gibt es auch Geräte für das Hacken zwischen den Pflanzen innerhalb der Pflanzenreihe. Diese sind vor allem für Gemüsebaubetriebe interessant. In Kulturen wie Salat, Kohl oder Sellerie können die Unkräuter innerhalb der Reihe nicht wie zum Beispiel im Mais durch die seitlich anhäufelnden Hackwerkzeuge verschüttet werden. Das Unkraut muss dort mit Hackwerkzeugen entfernt werden, um die Kulturpflanzen nicht zu verletzen und nicht zu verschmutzen. Abb. 4-7 zeigen vier kameragesteuerte Hackgeräte zum Einsatz innerhalb der Pflanzenreihen.




Hacken innerhalb der Pflanzenreihen. Von oben links im Uhrzeigersinn: Garford-In-Row-Weeder, Poulsen-Robovator, Steketee IC Weeder, Ferrari Remoweeder.
Ultraschallbasierte Steuerung
Bei diesem System orientieren sich die Ultraschallsensoren an Strukturen im Feld wie Pflanzenreihen oder Pflanzdämmen (Abb. 8). Es gibt Ausführungen, die direkt am Hackgerät montiert werden oder über einen universell verwendbaren Querverschieberahmen das Hackgerät steuern. Die Einsatzgrenzen sind mit Ausnahme der Beleuchtungsanforderungen ähnlich wie bei den kamerabasierten Steuerungen.

Satellitenbasierte Steuerung
Wird die Saat oder das Pflanzen mit einem präzis satellitengelenkten Traktor durchgeführt, dann kann beim Hacken den aufgezeichneten Saatspuren gefolgt werden (siehe Beitrag «Parallelfahrsysteme»). Diese sehr gerade angelegten Pflanzenreihen haben den Vorteil, dass das Hackgerät wesentlich geringeren Abweichungen zu folgen hat als bei manuell gelenkter Saat. Die Regelung eines Querverschieberahmens ist mit einem Satellitenempfänger ausgestattet, der dafür sorgt, dass das Hackgerät exakt der Säspur nachfährt (Abb. 9). Im Vergleich zu kamera- und ultraschallgesteuerten Geräten beeinflussen die Bestandeseigenschaften dieses Verfahren kaum. Fehlende Pflanzen, stärkere Verunkrautung, Seitenwind und Beleuchtung spielen keine Rolle.

Das Hacken ist auch allein auf Basis eines satellitenbasierten Traktorenlenksystems ohne separat angesteuerten Querverschieberahmen möglich. Voraussetzung sind Kulturen, bei denen die Hackwerkzeuge in einem Abstand von etwa 10 Zentimetern zu den Pflanzen geführt werden können, was zum Beispiel bei Mais und Zuckerrüben realisierbar ist. Die Verwendung satellitenbasierter Traktorenlenksysteme hat verglichen mit der Ansteuerung eines Querverschieberahmens den Vorteil, dass die Lenksysteme für weitere Arbeitsgänge bei Saat, Pflege und Ernte eingesetzt werden können. Daraus ergibt sich eine höhere Gesamtauslastung des Systems und weitergehende Fahrerentlastung.
Bei der satellitenbasierten Steuerung ist darauf zu achten, dass die Arbeitsgänge Saat und Hacken aufeinander aufbauen und entsprechend koordiniert werden müssen.
Spezialanwendung: Satellitenbasierte Aussaat im Verbund
Bei der satellitenbasierten Aussaat GEOSEED® werden die Pflanzen in einem Quadrat- oder Dreieckverbund platziert. Der Dreiecksverbund optimiert die Standraumverteilung der Pflanzen im Feld. Je nach Legeabstand haben alle Pflanzen so einen gleichmässigen Zugang zu Licht, Wasser und Nährstoffen. Für das Hacken eignet sich vor allem der Quadratverbund. Das Hacken erfolgt in zwei Arbeitsgängen, in Längs- und Querrichtung. Mit den zwei Hackdurchgängen wird die ganze Fläche bearbeitet und alle Unkräuter zwischen den Kulturpflanzen werden entfernt. Für die Aussaat wird eine umfangreichere technische Ausstattung von Traktor und Einzelkornsämaschine benötigt (siehe Absatz «Betriebswirtschaftliche Aspekte»).


Arbeitswirtschaftliche Aspekte
Eine hohe Flächenleistung ist die Voraussetzung für eine Erledigung der Hackdurchgänge unter vorteilhaften Bodenbedingungen auch in kurzen Schönwetterperioden.
Beim Hacken mit manueller Steuerung begrenzen Reaktionsgeschwindigkeit und Konzentrationsdauer die Arbeitsgeschwindigkeit, Arbeitsqualität und die Arbeitsdauer bzw. Flächenleistung. Hackgeräte können mit (Abb. 12) oder ohne zusätzlichen Steuermann gefahren werden. Geräte im Zwischenachs- und Frontanbau erleichtern die Gerätekontrolle durch den Traktorfahrer. Die Arbeitsgeschwindigkeit liegt in der Regel bei etwa 4 Stundenkilometern.

Eine Sensorsteuerung ermöglicht bei entsprechenden Einsatzbedingungen eine starke Steigerung der Fahrgeschwindigkeit auf über 10 Stundenkilometer (km/h). Diese hohen Geschwindigkeiten lassen sich kontinuierlich bei hoher Arbeitsqualität halten. Es ist zu berücksichtigen, dass hohe Fahrgeschwindigkeiten robuste Kulturen, eine entsprechende Pflanzenentwicklung und optimale Hackeigenschaften des Bodens bedingen.
Nachfolgende Tabelle zeigt einen Vergleich von Flächenleistungen beim Hacken mit 3 Metern Arbeitsbreite mit manueller Lenkung und zusätzlichem Steuermann sowie mit Sensorsteuerung. Die etwas geringeren Flächenleistungen der Kamerasteuerung sind auf die Rüstzeiten auf dem Feld zurückzuführen. Die Kamerasteuerung muss auf dem Feld gestartet und auf die Pflanzenreihen ausgerichtet werden. Die Flächenleistung steigt bei einer Verdoppelung der Fahrgeschwindigkeit (8 km/h) um 44 Prozent und bei einer Verdreifachung der Fahrgeschwindigkeit (12 km/h) um 69 Prozent.
Berechnete Flächenleistung von Hackgeräten mit drei Metern Arbeitsbreite und manueller Lenkung durch einen zusätzlichen Steuermann bzw. mit Sensorsteuerung in Abhängigkeit der Geschwindigkeit auf Basis einer Fläche von einem Hektar (Modellrechnung von Agroscope)
| Geschwindigkeit in km/h | Flächenleistung in ha/h | |
|---|---|---|
| Manuelle Steuerung | Kamerasteuerung | |
| 4 | 0.38 | 0.36 |
| 8 | * | 0.52 |
| 12 | * | 0.61 |
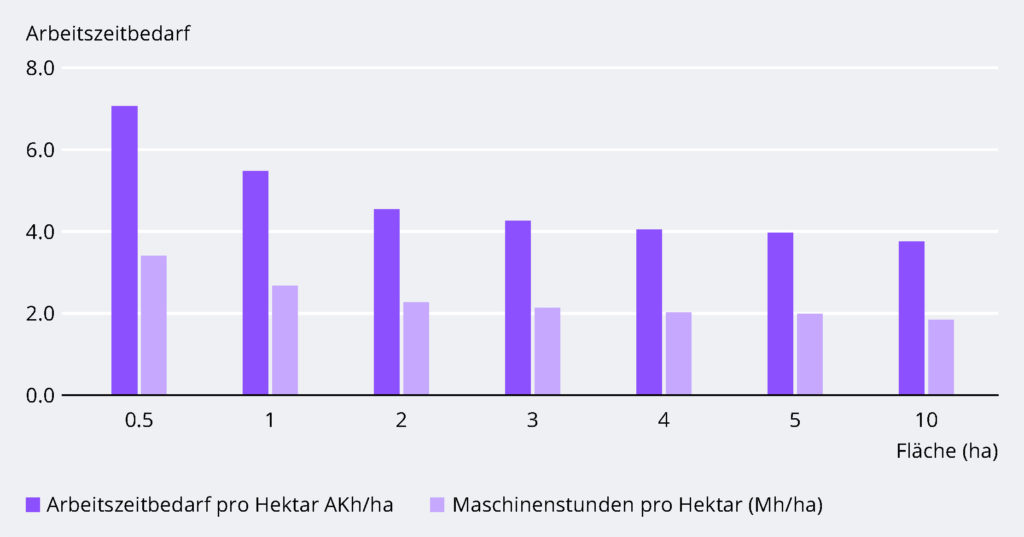
Folgende Grafik zeigt die benötigten Arbeitskraft- und Maschinenstunden der manuell gesteuerten Hacke mit einer Geschwindigkeit von vier Stundenkilometern. Es ist deutlich zu sehen, dass die Arbeitskraftstunden (AKh) durch die zweite Arbeitskraft nahezu doppelt so hoch sind wie die benötigten Maschinenstunden (Mh). Der Bedarf an Arbeitskraft- und Maschinenstunden nimmt mit zunehmender Fläche ab: Der Arbeitszeitbedarf fällt von 7,1 AKh/ha (3,4 Mh/ha) für eine Fläche von 0,5 Hektaren auf 3,8 AKh/ha (1,9 Mh/ha) für eine Fläche von 10 Hektaren, wobei die Abnahme ab zwei Hektaren nur noch gering ist.
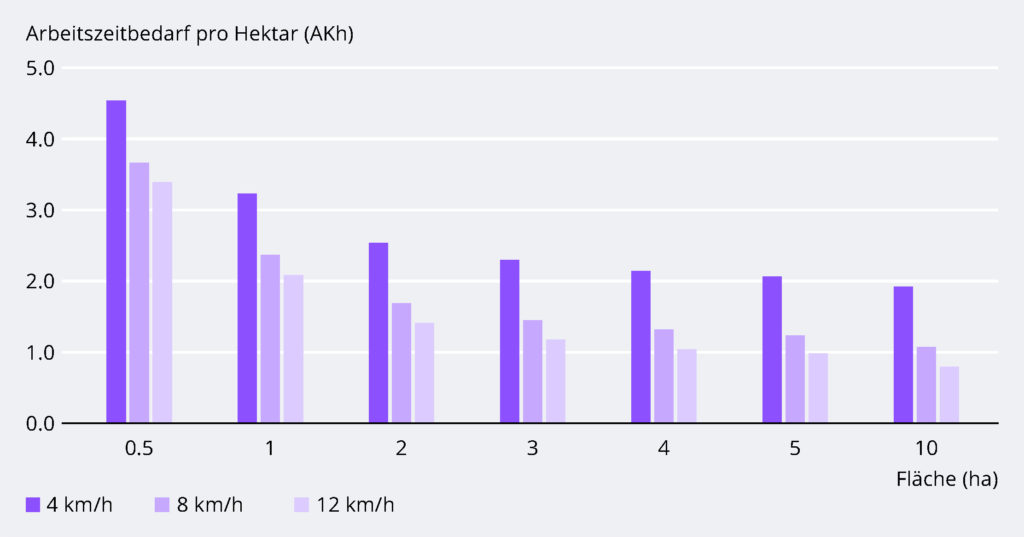
Folgende Grafik zeigt die benötigten Arbeitskraftstunden der Hacke mit Sensorsteuerung in den drei Geschwindigkeitsstufen 4/8/12 Stundenkilometer und nach Parzellengrössen von 0,5 bis 10 Hektaren. Alle drei Geschwindigkeitsstufen zeigen eine Degression mit zunehmender Parzellengrösse. Zudem ist die Reduktion des Arbeitszeitbedarfs zwischen den Geschwindigkeitsstufen 4 und 8 Stundenkilometer grösser als zwischen 8 und 12 Stundenkilometer. Mit steigender Parzellengrösse sinkt der Zeiteinsparungseffekt zwischen den drei Geschwindigkeitsstufen.
Der Effekt einer Sensorsteuerung auf den Arbeitszeitbedarf lässt sich bei drei Metern Arbeitsbreite und zwei Hektaren Parzellengrösse wie folgt beziffern:
- Wegfall Steuermann
–anstatt 4,5 nur 2,6 AKh/ha = ca. 40 % Zeiteinsparung - Steigerung Arbeitsgeschwindigkeiten von 4 km/h auf 8–12 km/h
–anstatt 2,6 rund 1,6 AKh/ha = ca. 40 % Zeiteinsparung - Gesamt anstatt 4,5 noch 1,6 AKh = ca. 64 % Zeiteinsparung
–Leistungssteigerung Verfahren um Faktor 3 in Bezug auf Arbeitszeitbedarf
Zusammenfassend zeigt sich, dass eine Sensorsteuerung aus arbeitswirtschaftlicher Sicht vor allem sinnvoll ist, wenn sich der Arbeitszeitbedarf durch die Einsparung einer Arbeitskraft deutlich reduzieren lässt und mit höheren Fahrgeschwindigkeiten höhere Flächenleistungen realisiert werden können. Die Hackdauer pro Tag lässt sich durch den Wegfall der Ermüdung des Fahrers mehrfach steigern. Wenn zusätzlich ein Hackgerät mit mehreren separat angesteuerten Hackfeldern eingesetzt wird, steigt die Flächenleistung nochmals entsprechend an.
Betriebswirtschaftliche Aspekte
Die Kosten für sensorgesteuerte Hackgeräte variieren nach Arbeitsbreite, Ausstattungsgrad, Einsatzzweck und gegebenenfalls vorhandener Vorausrüstung des Traktors.
- Die Anschaffungskosten für Sensorsteuerungen zum Hacken zwischen den Reihen liegen je nach Ausstattungsgrad und je nachdem, ob ein Querverschieberahmen benötigt wird oder nicht, zwischen etwa CHF 10’000 und CHF 30’000.
- Die Anschaffungskosten für komplette vierreihige Geräte zum Hacken zwischen und innerhalb der Reihe zwischen den Pflanzen bewegen sich zwischen CHF 70’000 und CHF 130’000.
- Präzise satellitenbasierte Lenksysteme liegen bei etwa CHF 15’000 bis CHF 25’000, wobei ca. CHF 1000 jährliche Zusatzkosten für Korrektursignale anfallen (siehe Beitrag «Parallelfahrsysteme»).
Hacken kann Herbizide stark reduzieren – in Mais und Zuckerrüben sind bei kombinierter Bandspritzung Einsparungen von rund 50 % möglich. Allerdings erfordern Hackverfahren in der Regel mehrere Überfahrten und sind damit teurer als die konventionelle Flächenspritzung, weil die Maschinen- und Arbeitskosten teils deutlich höher ausfallen.
Kosten im Überblick (pro Überfahrt und Hektar, Zuckerrüben)
| Verfahren | Mehrkosten gegenüber Flächenspritzung |
|---|---|
| Scharhacke mit GPS zwischen den Reihen + Bandspritzung | +35 CHF/ha |
| Kameragesteuerte Hacke zwischen den Reihen + Bandspritzung | +50 CHF/ha |
| Hacke zwischen und in der Reihe (vollständiger Herbizidverzicht) | deutlich höher |
Das Direktzahlungsprogramm «Verzicht auf Herbizide» vergütet CHF 250 je ha. Damit werden die Mehrkosten von zwei Hackdurchgängen vollständig gedeckt – der Herbizidverzicht auf Teilflächen wird so wirtschaftlich tragbar.
Praktische Einschränkungen beachten
Hacken ist nicht unter allen Bedingungen möglich: Bei zu feuchtem oder trockenem Boden, starker Hangneigung oder hohem Steinanteil scheidet es aus. Der Arbeitsaufwand ist deutlich höher als beim Spritzen, und die Wirksamkeit hängt stark von Wetter, Bodenart und Kulturstadium ab.P
räzisionshacken lohnt sich finanziell vor allem dort, wo Direktzahlungen beansprucht werden können. Ohne Förderung führt Hacken zu Mehrkosten. Die Technologie eignet sich besonders für Betriebe, die PSM gezielt reduzieren wollen und über geeignete Parzellen sowie die nötige Arbeitskapazität verfügen.
Rentabilitätsberechnungen müssen unter Berücksichtigung der einzelbetrieblichen Situation durchgeführt werden. Eine beispielhafte Vorgehensweise und Kennzahlen finden sich bei Agroscope unter www.maschinenkosten.ch.
Handlungsempfehlungen
- Bedienungsanleitung lesen und Arbeitsabläufe ausserhalb der Saison üben
- Auf korrekte Montage der Komponenten achten
- Regelmässig Software-Updates durchführen (lassen)
- Auf gleichmässigen Pneudruck links und rechts, gleiche Höhe der Koppelungspunkte an den Unterlenkern sowie gerade Position der angehängten Geräte hinter dem Traktor achten
- Nach jedem Wechsel der angehängten Geräte System kalibrieren
Entwicklungsperspektiven
Verschiedene Hersteller entwickeln autonome Roboter zur mechanischen Unkrautbekämpfung und bringen diese Schritt für Schritt auf den Markt. Ein komplexes Thema bei autonomen Geräten ist allerdings die sinnvolle Integration in die betrieblichen Arbeitsabläufe. Auch wenn die Geräte keinen Fahrer haben, so müssen sie doch aufs Feld gebracht, dort überwacht, von allfälligen Störungen befreit und nach der Arbeit wieder abgeholt werden. Aufgrund der meist geringen Arbeitsbreiten haben sie nicht dieselbe Flächenleistung wie herkömmliche, traktorbetriebene Geräte, was vor allem bei kurzen Schönwetterzeitfenstern für eine Bearbeitung nachteilig ist. Vor diesem Hintergrund relativiert sich der Vorteil eines theoretisch rund um die Uhr möglichen Maschineneinsatzes. Erst die Lösung der arbeitswirtschaftlichen Herausforderungen schafft die Voraussetzungen für einen breiten Praxiseinsatz solcher Geräte. Wenn diesbezüglich auch noch einiges an Arbeit ansteht, so zeigen die folgenden Videos doch gut auf, wie autonome Unkrautbekämpfung zukünftig aussehen könnte.

Feldroboter Farmdroid FD 20: Autonome Saat von Zuckerrüben

Jätroboter „Anatis“ von Carré

Projekt „Digifermes“ testet Lösungen zur Präzisionslandwirtschaft in Frankreich

Jätroboter „Naïo Dino“

Bonirob
Herstellerüberblick
Traktorgezogene Geräte
| Hersteller | Erkennungssystem | Hacken auch innerhalb der Reihe zwischen den Pflanzen |
|---|---|---|
| Einböck (AT) | Kamera | |
| F. Poulsen Engineering (DK) | Kamera | √ |
| Garford Farm Machinery (UK) | Kamera | √ |
| Hatzenbichler (AT) | Kamera | |
| KULT (DE) | Kamera | √ |
| Kverneland GeoSeed (DE) | Satellitengesteuerte Aussaat, benötigt zusätzlich satellitengesteuertes Hacken | √ |
| Reichhardt Steuerungstechnik (DE) | Satellit, Ultraschall | |
| Ferrari Remoweed (IT) | Kamera | √ |
| Schmotzer (DE) | Kamera | |
| Steketee IC Weeder (NL) | Kamera | √ |
Selbstfahrende Roboter
Der Markt selbstfahrender Hackroboter entwickelt sich dynamisch. Auf der Webseite www.bioaktuell.ch wird unter Pflanzenbau – Präzisionslandwirtschaft über Neuentwicklungen berichtet.
| Hersteller |
|---|
| Naïo Technologies, www.naio-technologies.com |
| Bonirob, www.deepfield-robotics.com |
| Anatis, www.carre.fr |
| Farmdroid, www.farmdroid.dk |
Referenzen
- Holpp M., 2016: Präzisionsunkrautkontrolle in Reihenkulturen. Agroscope-Transfer 130.
- Martin D., 2015. Utilisation d’un tracteur équipé d’un système d’autoguidage haute précision par satellite avec une sarcleuse non dirigée. Bachelorarbeit, ETH Zürich.
- Schnieper S., 2017. Hackroboter im Gemüsebau. Projektbericht, Liebegg.
- Stehle T., 2015. Kameragesteuertes Hacken; Betrachtung von Einflussfaktoren, Verfahrenstechnik und Arbeitswirtschaft. Masterarbeit, Uni Hohenheim.
Hinweis
Die Texte und das Bildmaterial stammen aus dem Fachmedium «Digitale Technologien in der Landwirtschaft», das von der Edition-lmz AG 2021 herausgegeben wurde.