Thèmes
Systèmes de sarclage basés sur des capteurs
La méthode de binage idéale présente une qualité de travail élevée tout en offrant un rendement élevé et peut être réalisée par une seule personne, qui est déchargée de la commande de la bineuse grâce à la technique. Cela réduit les coûts de main-d'œuvre ainsi que l'utilisation d'herbicides.
A l'avenir, de plus en plus de robots autonomes seront mis sur le marché pour le désherbage mécanique.
Cet article a été traduit automatiquement

Aperçu
Le binage des cultures en ligne était l’une des méthodes standard de contrôle des mauvaises herbes jusqu’à l’introduction des herbicides. Pour des raisons de procédé et d’économie de main-d’œuvre, les bineuses ont disparu de la plupart des exploitations. Par rapport à l’application de produits phytosanitaires, la fenêtre d’entretien pour un travail du sol est plus petite, le rendement par unité de surface est plus faible en raison des largeurs de travail réduites et le temps de travail nécessaire, surtout si une personne supplémentaire est requise pour piloter la bineuse, est nettement plus élevé. Pendant longtemps, seules les exploitations biologiques pratiquaient le binage. La méthode de travail a gagné en importance dans le contexte des mauvaises herbes résistantes aux herbicides, de la réduction des substances actives phytosanitaires autorisées et de la protection des eaux. Pour une exécution efficace du travail, des commandes et des systèmes de guidage basés sur des capteurs et des satellites sont disponibles, ce qui augmente l’efficacité du procédé et réduit les coûts de travail.

Binage basé sur des capteurs dans les cultures en ligne (© Agrofutura, Martin Holp)
Domaines d’application et avantages
- Contrôle mécanique des mauvaises herbes à haut débit de chantier dans les cultures en ligne comme le maïs, la betterave à sucre, le tournesol, le soja, les légumes
- La commande des outils de binage basée sur des capteurs permet de biner entre les rangées de plantes et dans la rangée entre les plantes
- Possibilité de combiner le binage avec la pulvérisation sur bande
- Réduction forte à totale de l’utilisation d’herbicides
Aperçu de la technologie
La méthode de binage idéale présente une qualité de travail élevée tout en offrant un rendement élevé et peut être réalisée par une seule personne, qui est déchargée de la commande de la bineuse grâce à la technique. Des bineuses guidées par caméra, par satellite ou par ultrasons sont proposées à cet effet. Ceux-ci sont généralement montés sur un cadre de déplacement transversal à articulation hydraulique, qui guide les outils de binage avec précision le long de la rangée de plantes.
Contrôle basé sur une caméra
En ce qui concerne les caméras, trois fabricants couvrent une grande partie du marché. Le système Claas est distribué par les différents fournisseurs de bineuses, Schmotzer et Garford proposent également leurs propres systèmes. Les appareils fonctionnent selon le même principe de base : la caméra a une ou plusieurs rangées de plantes dans son champ de vision, analyse leur évolution et commande le cadre de déplacement transversal. Les vitesses de déplacement peuvent dépasser les 10 kilomètres par heure (figures 1 et 2). La qualité de la régulation dépend fortement de la visibilité des rangées. Les plantes doivent avoir une taille minimale pour que les caméras puissent les reconnaître. De longues absences sur les rangées de plantes détectées ainsi qu’un fort enherbement entraînent une détection peu fiable des rangées. Le vent latéral et un faible éclairage peuvent également nuire à la précision de la régulation. Il est donc important, même avec des commandes de caméra, d’effectuer le traitement dans la bonne fenêtre temporelle. Contrairement à la commande manuelle, plusieurs caméras permettent de biner simultanément plusieurs largeurs de travail de semis (fig. 3).


La caméra détecte deux rangées de plantes et commande le cadre de déplacement transversal de manière dynamique.

Application spéciale : crochet de caméra à l’intérieur de la rangée
Outre les commandes pour le binage entre les rangées de plantes, il existe également des appareils pour le binage entre les plantes à l’intérieur de la rangée de plantes. Elles sont surtout intéressantes pour les exploitations maraîchères. Dans les cultures telles que la salade, le chou ou le céleri, les mauvaises herbes ne peuvent pas être dispersées à l’intérieur du rang, comme c’est le cas par exemple dans le maïs, par les outils de binage qui s’accumulent sur les côtés. Les mauvaises herbes doivent y être enlevées à l’aide d’outils de binage afin de ne pas blesser les plantes cultivées et de ne pas les salir. Fig. 4-7 montrent quatre bineuses commandées par caméra à utiliser à l’intérieur des rangées de plantes.




Biner à l’intérieur des rangées de plantes. En haut à gauche, dans le sens des aiguilles d’une montre : Garford-In-Row-Weeder, Poulsen-Robovator, Steketee IC Weeder, Ferrari Remoweeder.
Contrôle basé sur les ultrasons
Dans ce système, les capteurs à ultrasons s’orientent sur les structures dans le champ, comme les rangées de plantes ou les buttes de plantation (fig. 8). Il existe des versions qui se montent directement sur la bineuse ou qui commandent la bineuse via un cadre de déplacement transversal à usage universel. Les limites d’utilisation sont similaires à celles des commandes basées sur des caméras, à l’exception des exigences en matière d’éclairage.

Contrôle basé sur le satellite
Si le semis ou la plantation sont effectués avec un tracteur guidé par satellite de manière précise, il est alors possible de suivre les traces de semis enregistrées lors du binage (voir l’article « Systèmes de conduite parallèle »). Ces rangées de plantes très droites ont l’avantage que la bineuse doit suivre des déviations beaucoup moins importantes que dans le cas d’un semis guidé manuellement. La régulation d’un châssis à déplacement transversal est équipée d’un récepteur satellite qui veille à ce que la bineuse suive exactement la trace de semis (fig. 9). En comparaison avec les appareils commandés par caméra ou par ultrasons, les caractéristiques du stock n’influencent guère cette méthode. L’absence de plantes, un enherbement plus important, le vent latéral et l’éclairage ne jouent aucun rôle.

Le binage est également possible seul sur la base d’un système de guidage de tracteur basé sur un satellite, sans châssis de déplacement transversal commandé séparément. Les conditions préalables sont des cultures pour lesquelles les outils de binage peuvent être guidés à une distance d’environ 10 centimètres des plantes, ce qui est réalisable par exemple pour le maïs et les betteraves sucrières. L’utilisation de systèmes de guidage de tracteurs basés sur des satellites présente l’avantage, par rapport à la commande d’un châssis de déplacement transversal, de pouvoir utiliser les systèmes de guidage pour d’autres opérations de semis, d’entretien et de récolte. Il en résulte une meilleure utilisation globale du système et une réduction supplémentaire de la charge de travail du conducteur.
Avec le guidage par satellite, il faut veiller à ce que les opérations de semis et de binage se suivent et soient coordonnées en conséquence.
Application spéciale : semis en ligne basé sur les satellites
Avec le système d’ensemencement par satellite GEOSEED®, les plantes sont placées dans un ensemble de carrés ou de triangles. L’association de triangles optimise la répartition de l’espace au sol des plantes dans le champ. En fonction de la distance de ponte, toutes les plantes ont ainsi un accès régulier à la lumière, à l’eau et aux nutriments. Pour le binage, c’est surtout l’assemblage en carré qui convient. Le binage s’effectue en deux temps, dans le sens de la longueur et dans le sens de la largeur. Les deux passages de bineuse permettent de travailler sur toute la surface et d’éliminer toutes les mauvaises herbes entre les cultures. Pour le semis, un équipement technique plus important du tracteur et du semoir monograine est nécessaire (voir paragraphe « Aspects économiques de l’exploitation »).


Aspects économiques du travail
Un rendement de surface élevé est la condition sine qua non pour effectuer les passages de bineuse dans des conditions de sol avantageuses, même pendant les courtes périodes de beau temps.
Lors du binage avec commande manuelle, la vitesse de réaction et le temps de concentration limitent la vitesse de travail, la qualité du travail et la durée du travail ou le rendement par unité de surface. Les bineuses peuvent être conduites avec (fig. 12) ou sans barreur supplémentaire. Les outils montés entre les essieux ou à l’avant facilitent le contrôle des outils par le conducteur du tracteur. La vitesse de travail est généralement d’environ 4 kilomètres par heure.

Une commande par capteur permet, dans des conditions d’utilisation appropriées, d’augmenter fortement la vitesse de déplacement à plus de 10 kilomètres par heure (km/h). Ces vitesses élevées peuvent être maintenues en continu avec une qualité de travail élevée. Il faut tenir compte du fait que des vitesses d’avancement élevées nécessitent des cultures robustes, un développement végétal correspondant et des propriétés de binage optimales du sol.
Le tableau ci-dessous présente une comparaison des rendements à l’hectare lors du binage avec une largeur de travail de 3 mètres, avec direction manuelle et barre de commande supplémentaire et avec commande par capteur. Les performances de surface légèrement inférieures de la commande par caméra s’expliquent par les temps de préparation dans le champ. La commande de la caméra doit être lancée dans le champ et orientée vers les rangées de plantes. Le débit de chantier augmente de 44 % lorsque la vitesse d’avancement est doublée (8 km/h) et de 69 % lorsqu’elle est triplée (12 km/h).
Rendement à l’hectare calculé pour des bineuses d’une largeur de travail de trois mètres avec guidage manuel par un conducteur supplémentaire ou avec guidage par capteur en fonction de la vitesse, sur la base d’une surface d’un hectare (modèle de calcul d’Agroscope)
| Vitesse en km/h | Rendement de surface en ha/h | |
|---|---|---|
| Contrôle manuel | Commande de la caméra | |
| 4 | 0.38 | 0.36 |
| 8 | * | 0.52 |
| 12 | * | 0.61 |
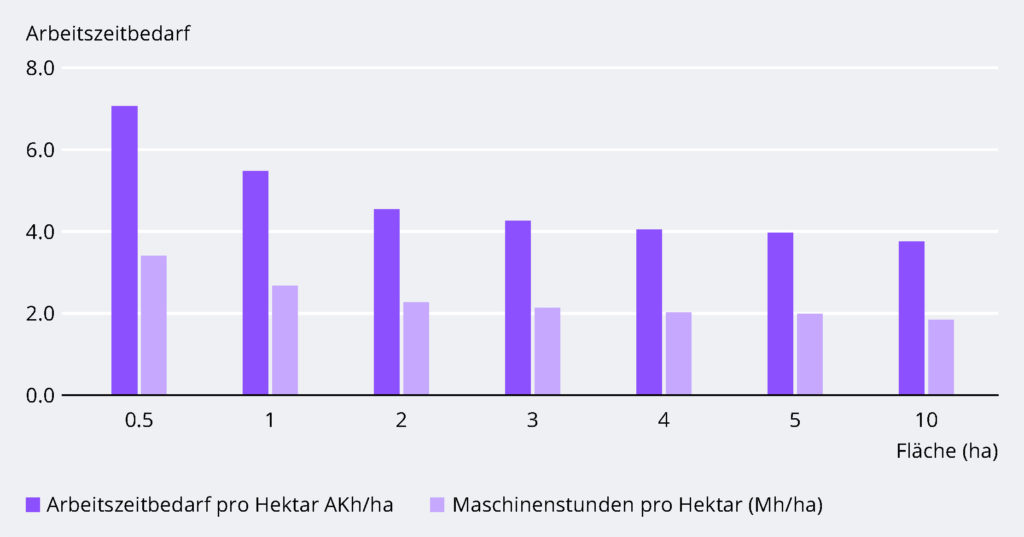
Le graphique suivant montre les heures de travail et de machine nécessaires pour la houe à commande manuelle à une vitesse de quatre kilomètres par heure. On voit clairement que les heures de travail (AKh) dues au deuxième travailleur sont presque deux fois plus élevées que les heures machine (Mh) nécessaires. Le besoin en heures de travail et en heures-machine diminue avec l’augmentation de la surface : Le besoin en heures de travail passe de 7,1 AKh/ha (3,4 Mh/ha) pour une surface de 0,5 hectare à 3,8 AKh/ha (1,9 Mh/ha) pour une surface de 10 hectares, la diminution n’étant plus que faible à partir de deux hectares.
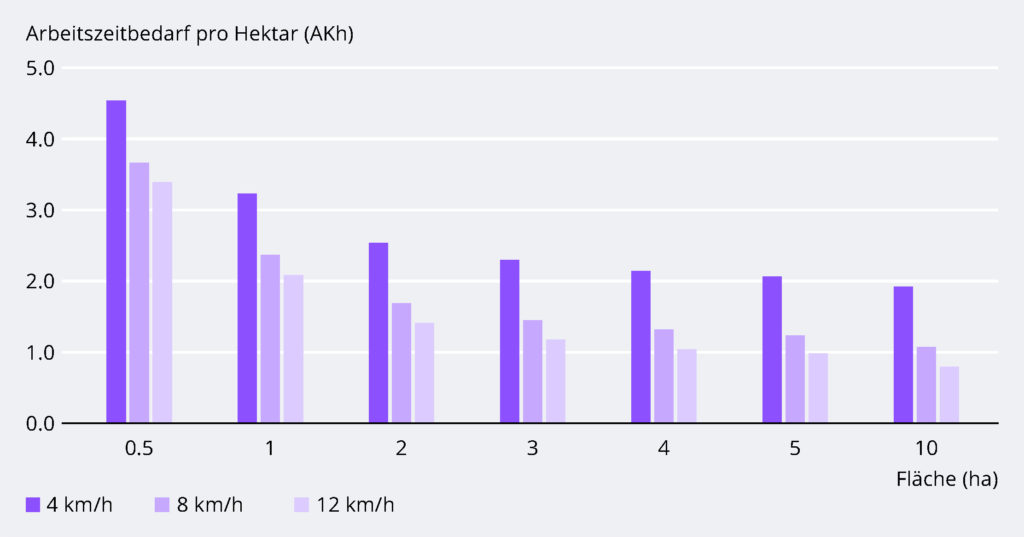
Le graphique suivant montre les heures de travail nécessaires pour la houe avec commande par capteur dans les trois niveaux de vitesse 4/8/12 kilomètres par heure et selon la taille des parcelles de 0,5 à 10 hectares. Les trois niveaux de vitesse montrent une dégressivité avec l’augmentation de la taille des parcelles. De plus, la réduction du temps de travail nécessaire est plus importante entre les vitesses de 4 et 8 kilomètres par heure qu’entre 8 et 12 kilomètres par heure. Plus la taille de la parcelle augmente, plus l’effet de gain de temps entre les trois niveaux de vitesse diminue.
L’effet d’une commande par capteur sur le temps de travail nécessaire peut être chiffré comme suit pour une largeur de travail de trois mètres et une taille de parcelle de deux hectares :
- Suppression du timonier
-au lieu de 4,5 seulement 2,6 AKh/ha = environ 40 % de gain de temps - Augmentation des vitesses de travail de 4 km/h à 8-12 km/h
-au lieu de 2,6 environ 1,6 AKh/ha = environ 40 % de gain de temps - Total de 1,6 AKh au lieu de 4,5 = environ 64 % de gain de temps
-Augmentation de la performance Procédure d’un facteur 3 par rapport au temps de travail nécessaire
En résumé, il s’avère qu’une commande par capteurs est surtout judicieuse du point de vue de l’économie du travail lorsque le besoin en temps de travail peut être nettement réduit grâce à l’économie d’une main d’œuvre et que des rendements de surface plus élevés peuvent être réalisés avec des vitesses d’avancement plus élevées. La durée de hachage par jour peut être augmentée plusieurs fois en supprimant la fatigue du conducteur. Si l’on utilise en plus une bineuse avec plusieurs champs de hachage commandés séparément, le rendement par unité de surface augmente encore en conséquence.
Aspects de gestion d’entreprise
Les coûts des bineuses commandées par capteurs varient en fonction de la largeur de travail, du niveau d’équipement, de l’utilisation prévue et, le cas échéant, du prééquipement du tracteur.
- Les coûts d’acquisition des commandes par capteurs pour le binage entre les rangs se situent entre 10 000 et 30 000 CHF environ, selon le degré d’équipement et selon qu’un cadre de déplacement transversal est nécessaire ou non.
- Les coûts d’acquisition d’outils complets à quatre rangs pour sarcler entre les plantes et dans le rang se situent entre 70 000 et 130 000 CHF.
- Les systèmes de guidage précis basés sur des satellites se situent entre 15 000 et 25 000 CHF environ, avec des coûts annuels supplémentaires d’environ 1000 CHF pour les signaux de correction (voir l’article « Systèmes de conduite parallèle »).
- Pour le semis par satellite en triangle et en rectangle (Kverneland GEOSEED®), il faut un semoir monograine adapté (modèle Optima 8 rangs env. CHF 45’000), un entraînement électrique, ISOBUS, un terminal, des composants de commande GeoSeed (env. CHF 25’000) et un système de guidage par satellite de haute précision (env. CHF 20’000 à CHF 30’000 ), investissement total env. CHF 90’000 à CHF 100’000.
Les calculs de rentabilité doivent être effectués en tenant compte de la situation de chaque exploitation. Une procédure exemplaire et des chiffres clés sont disponibles auprès d’Agroscope sous www.maschinenkosten.ch.
Recommandations d’action
- Lire le mode d’emploi et s’exercer aux opérations hors saison
- Veiller au montage correct des composants
- Effectuer (faire effectuer) régulièrement les mises à jour du logiciel
- Veiller à une pression uniforme des pneus à gauche et à droite, à la même hauteur des points d’attelage sur les bras inférieurs et à la position droite des outils attelés derrière le tracteur.
- Calibrer le système après chaque changement d’appareil attaché
Perspectives de développement
Différents fabricants développent des robots autonomes pour le désherbage mécanique et les commercialisent petit à petit. L’intégration judicieuse des appareils autonomes dans les processus de travail de l’entreprise est toutefois un sujet complexe. Même si les appareils n’ont pas de chauffeur, ils doivent être amenés dans le champ, surveillés, débarrassés des éventuelles pannes et récupérés après le travail. En raison de leurs largeurs de travail généralement réduites, ils n’ont pas le même débit de chantier que les outils traditionnels entraînés par un tracteur, ce qui est particulièrement désavantageux pour un traitement lors de courtes fenêtres de beau temps. Dans ce contexte, l’avantage d’une utilisation des machines théoriquement possible 24 heures sur 24 devient relatif. Ce n’est qu’en résolvant les défis de l’économie du travail que l’on créera les conditions d’une utilisation pratique à grande échelle de tels appareils. Même s’il reste encore beaucoup de travail à faire dans ce domaine, les vidéos suivantes montrent bien à quoi pourrait ressembler le désherbage autonome à l’avenir.

Robot de terrain Farmdroid FD 20 : semis autonome de betteraves sucrières

Robot de désherbage « Anatis » de Carré

Le projet « Digifermes » teste des solutions d’agriculture de précision en France

Robot de désherbage « Naïo Dino

Bonirob
Aperçu des fabricants
Outils tractés par un tracteur
| Fabricant | Système de reconnaissance | Biner également à l’intérieur du rang entre les plantes |
|---|---|---|
| Einböck (AT) | Caméra | |
| F. Poulsen Engineering (DK) | Caméra | √ |
| Garford Farm Machinery (UK) | Caméra | √ |
| Hatzenbichler (AT) | Caméra | |
| KULT (DE) | Caméra | √ |
| Kverneland GeoSeed (FR) | Semis guidé par satellite, nécessite en plus un binage guidé par satellite | √ |
| Reichhardt Steuerungstechnik (DE) | satellite, ultrasons | |
| Ferrari Remoweed (IT) | Caméra | √ |
| Schmotzer (DE) | Caméra | |
| Steketee IC Weeder (NL) | Caméra | √ |
Robots automoteurs
Le marché des robots bineurs automoteurs se développe de manière dynamique. Sur le site www.bioaktuell.ch, la rubrique Production végétale – Agriculture de précision fait état des nouveaux développements.
| Fabricant |
|---|
| Naïo Technologies, www.naio-technologies.com |
| Bonirob, www.deepfield-robotics.com |
| Anatis, www.carre.fr |
| Farmdroid, www.farmdroid.dk |
Références
- Holpp M., 2016 : Contrôle de précision des adventices dans les cultures en ligne. Transfert Agroscope 130.
- Martin D., 2015. Utilisation d’un tracteur équipé d’un système d’autoguidage haute précision par satellite avec une sarcleuse non dirigée. Travail de bachelor, EPF Zurich.
- Schnieper S., 2017. Des robots bineurs dans la culture maraîchère. Rapport de projet, Liebegg.
- Stehle T., 2015. Hachage commandé par caméra ; examen des facteurs d’influence, de la technique des procédés et de la gestion du travail. Travail de master, Université de Hohenheim.
Remarque
Les textes et les images proviennent du média spécialisé « Technologies numériques dans l’agriculture », publié par Edition-lmz SA 2021.