Themen
Globale Navigations-Satellitensysteme
Globale Navigationssatellitensysteme (GNSS) bilden die Grundlage für die Ortung und Navigation von landwirtschaftlichen Fahrzeugen und Geräten. Die Angaben zur Geschwindigkeit, Fahrtrichtung und zur genauen Position durch GNSS stellen eine zentrale Rolle in der Präzisionslandwirtschaft dar. Für den Einsatz in der Landwirtschaft braucht es teilweise ergänzende, kostenpflichtige Korrektursignale.
Überblick
- Globale Navigationssatellitensysteme (GNSS) bilden die Grundlage für die Ortung und Navigation von landwirtschaftlichen Fahrzeugen und Geräten. Die Angaben zur Geschwindigkeit, Fahrtrichtung und zur genauen Position durch GNSS stellen eine zentrale Rolle in der präzisen Landbewirtschaftung (Precision Farming, Smart Farming, Farming 4.0) dar.
- Für die Satellitennavigation genutzt werden das Global Positioning System (Navstar-GPS) der USA, das Globalnaja Nawigazionnaja Sputnikowaja Sistema (GLONASS) aus Russland, das europäische System Galileo, das chinesische System COMPASS/BeiDou-2 (BDS) und das japanische Quasi-Zenit-Satelliten-System (QZSS). Die Funktionsweisen der verschiedenen GNSS sind grundsätzlich die gleichen und unterscheiden sich lediglich in technischen Details.
- GNSS-Positionssignale werden zum Beispiel zur Lenkung von Traktoren und Erntemaschinen mit Parallelfahrsystemen (siehe Beitrag «Parallelfahrsysteme») und zur Ansteuerung von Sämaschinen, Pflanzenschutzgeräten und Hackgeräten (siehe Beitrag «Sensorbasierte Hacksysteme») genutzt.
Anwendungsgebiete
- Für den Einsatz in der Landwirtschaft braucht es teilweise ergänzende, kostenpflichtige Korrektursignale, um die geforderte hohe Positionierungsgenauigkeit zu erreichen.
- Geschwindigkeitsbestimmung zur Gerätesteuerung (z. B. Saat-, Dünger- oder Pflanzenschutzarbeiten)
- Absolute Positionsbestimmung (z. B. Vermessung von Schlägen oder Ertragskartierung, teilflächenspezifische Bewirtschaftung, permanent genutzte Fahrspuren (Controlled Traffic Farming CTF)
- Relative Positionsbestimmung (z. B. Parallelfahrsysteme/Teilbreitenschaltung Section Control)
- Geschwindigkeitsbestimmung zur Gerätesteuerung (z. B. Saat-, Dünger- oder Pflanzenschutzarbeiten)
- Absolute Positionsbestimmung (z. B. Vermessung von Schlägen oder Ertragskartierung, teilflächenspezifische Bewirtschaftung, permanent genutzte Fahrspuren (Controlled Traffic Farming CTF)
- Relative Positionsbestimmung (z. B. Parallelfahrsysteme/Teilbreitenschaltung Section Control)
Funktionsgrundlagen Positionsbestimmung
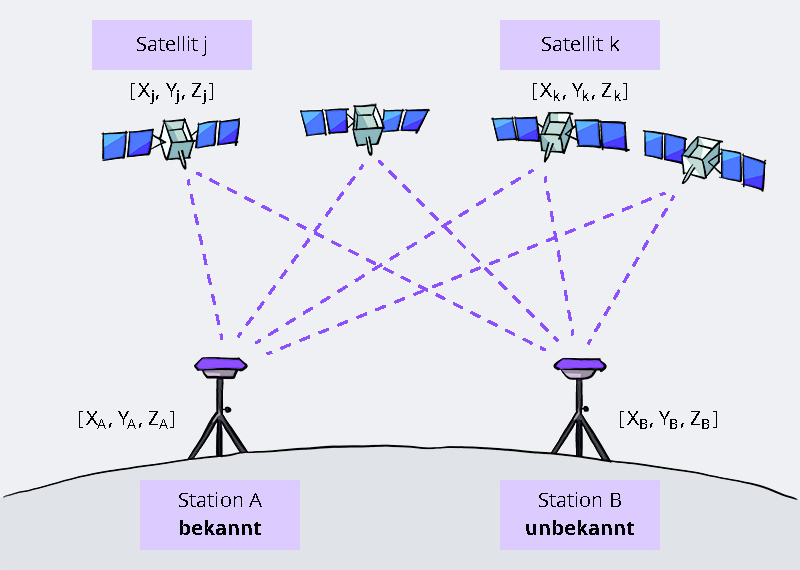
Für die Positionsbestimmung auf der Erde werden drei Komponenten benötigt: Satelliten im Weltraum, eine Bodenstation als Kontrollzentrum (Station A) und ein Empfänger (Station B) (Abb. 1).
Die Satelliten eines GNSS kreisen auf bekannten festen Umlaufbahnen um die Erde. Sie beinhalten eine hochgenaue Atomuhr, eine Recheneinheit, eine Sendeeinheit und eine Empfangseinheit. Die Umlaufbahnen der Satelliten werden via Sende- und Empfangseinheiten von den Kontrollzentren regelmässig berechnet und korrigiert. Ein Satellit sendet seine genaue Uhrzeit und seine Position aus, die von dem GNSS-Empfänger auf dem landwirtschaftlichen Fahrzeug oder Gerät verarbeitet werden.
Der Empfänger verfügt über eine Antenne und eine Recheneinheit, mit welcher seine Position anhand der von den Satelliten gesendeten Uhrzeiten und Positionen berechnet wird. Die Position des Empfängers wird durch die Messung der Laufzeit der von den Satelliten gesendeten Funksignalen bestimmt.
Für die Positionsbestimmung eines Empfängers mit den Koordinaten X, Y, Z (Länge, Breite, Höhe) werden mehrere Satelliten benötigt, die unterschiedliche Signale senden. Nur so kann der Empfänger die einzelnen Satelliten erkennen und seine Position mit den Koordinaten X, Y und Z korrekt bestimmen. Die Satelliten haben eine unterschiedliche Distanz zum Empfänger und die ausgesendeten Signale benötigen unterschiedlich lang, bis sie beim Empfänger ankommen. Der Empfänger berechnet aus den bekannten Satellitenpositionen und den unterschiedlich langen Signallaufzeiten seine Position.
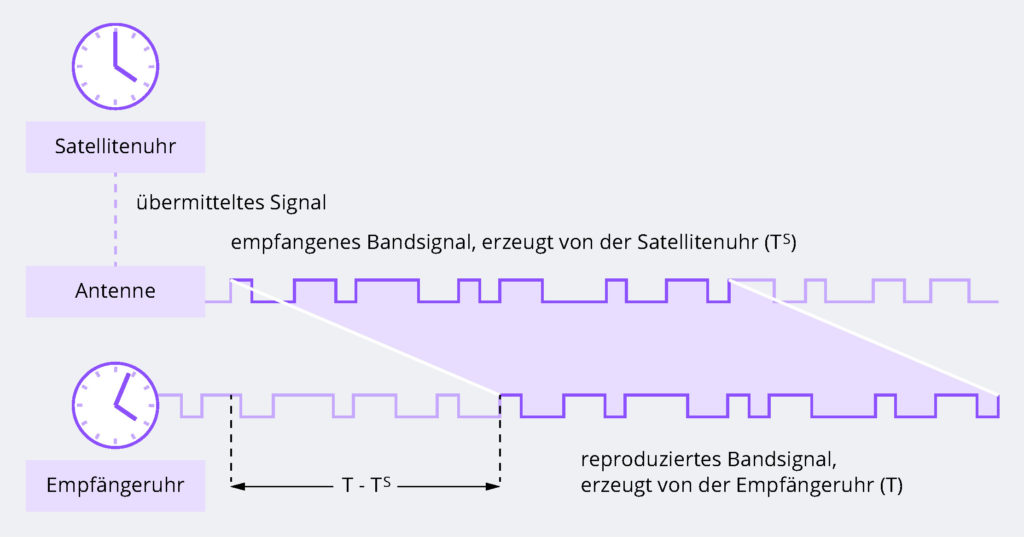
Jeder Satellit sendet eine für ihn definierte Folge von Bits als Bandsignal. Diese Bandsignale mit den dazugehörigen Satelliten sind dem Empfänger bekannt. Mit der Codemessung wird die Laufzeit eines Bandsignals mit dem Schlüssel-Loch-Prinzip gemessen. Der Empfänger vergleicht das empfangene Bandsignal (Schlüssel) mit einem deckungsgleichen, von ihm selbst erzeugtem Signal (Loch). Er verschiebt das von ihm erzeugte Signal zeitlich so lange, bis die Signale übereinstimmen (Abb. 2). Die zeitliche Verschiebung entspricht der Laufzeit des Signals. Die Codemessung wird von allen GNSS-Empfängern angewendet.
Eine weitere Möglichkeit, die Laufzeit eines Signals zu berechnen, ist die Trägerphasenmessung. Dabei wird die Phase eines oder zweier Signale (Verschiebung der Schwingung gegenüber dem Nullpunkt der Schwingung) verwendet. Die Trägerphasenmessung ist aufwendiger als die Codemessung und wird in hochwertigen Empfängern eingesetzt. Sie bietet eine sehr genaue Positionsbestimmung und bildet die Grundlage für die Positionsbestimmung höchster Genauigkeit, die Real-Time-Kinematik-Systeme (RTK).
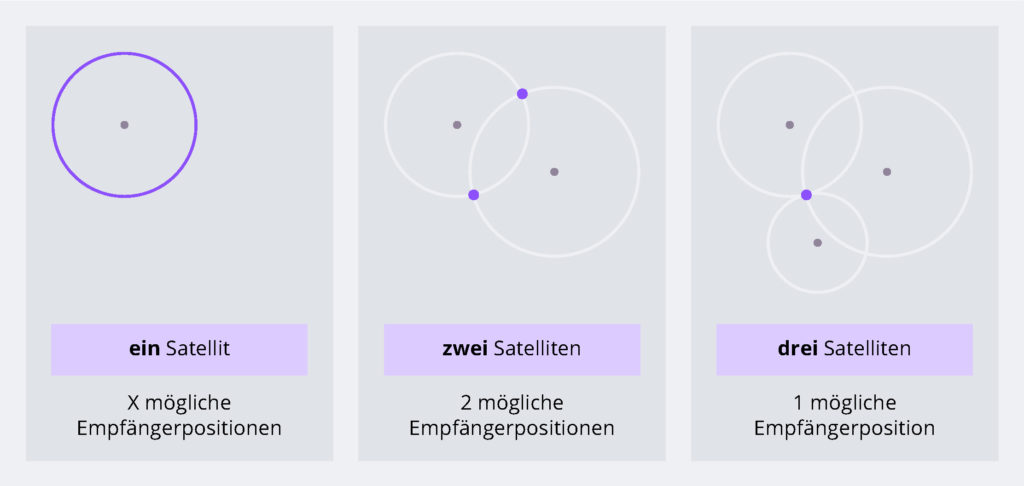
Zur Bestimmung der eindeutigen Position eines Empfängers werden mindestens drei verfügbare Satelliten benötigt (Abb. 3). Mit dem Prinzip der Codemessung kann ein Empfänger die Entfernung zu einem Satelliten bestimmen. Die Position des Empfängers auf der Erde zu bestimmen, ist mit nur einem Signal jedoch nicht möglich. Wenn zwei Signale erfasst werden, ergeben sich aus den berechneten Entfernungen zwei Schnittpunkte und somit zwei mögliche Empfängerpositionen. Erst die Berechnung dreier unterschiedlicher Laufzeiten von Signalen, kombiniert mit den genauen Positionsangaben zu den Satelliten, ermöglichen die eindeutige Bestimmung der Empfängerposition. Diese Methode der Positionsbestimmung wird Trilateration genannt. Durch die Erfassung eines vierten Satelliten kann zusätzlich die Empfängerhöhe (Höhe über Meer) berechnet werden.
Eine höhere Anzahl verfügbarer Satelliten resultiert nicht in einer höheren Genauigkeit, sondern in einer Erhöhung der Signalverfügbarkeit. Beim US-amerikanischen GPS-System umkreisen etwa 30 Satelliten auf unterschiedlichen Umlaufbahnen die Erde. Es ändert permanent, welche Satelliten für den Empfänger sichtbar sind und für die Positionsberechnung verwendet werden. Für eine zuverlässige Positionsbestimmung sollten für den Empfänger daher acht bis zehn Satelliten «sichtbar» sein.
Fehlerquellen bei der Laufzeitmessung
Uhrenfehler
Funksignale breiten sich im Weltall annähernd mit Lichtgeschwindigkeit aus und kleine Messungenauigkeiten der Signallaufzeit haben grosse Positionsabweichungen zur Folge. Geringfügige, unter anderem durch Gravitationseffekte verursachte Abweichungen zwischen den für die Laufzeitmessung verwendeten Atomuhren der Satelliten und den Bodenstationen, werden permanent korrigiert.
Satellitenbahnfehler
Die Satelliten der GNSS umkreisen in circa zwölf Stunden einmal die Erde auf festen Umlaufbahnen. Diese Umlaufbahnen können mathematisch berechnet und eindeutig bestimmt werden. Aufgrund physikalischer Effekte weisen Satelliten geringe Abweichungen zur berechneten Laufbahn auf.
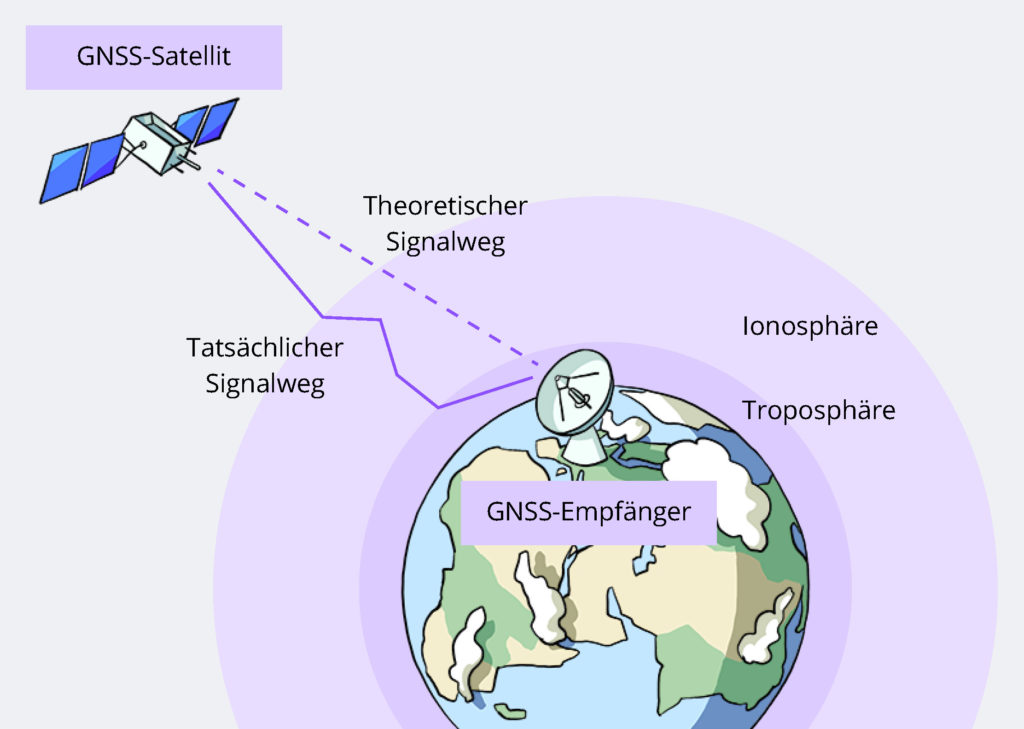
Ionos- und troposphärische Refraktion
Die Ionos- und die Troposphäre sind Teile der Atmosphäre über der Erdoberfläche (Abb. 4). Die Refraktion dieser Sphären beschreibt die Beeinflussung der Bewegungsrichtung und -geschwindigkeit der Satellitensignale in der Atmosphäre. In der Ionosphäre (80–1000 km ü.M.) beeinflussen freie Elektronen das Satellitensignal in seiner Richtung und Geschwindigkeit. Die Troposphäre befindet sich zwischen 0 und 15 Kilometern über Meer und verfälscht die absolute Positionsbestimmung je nach Luftdruck, Wassergehalt und Temperatur der Luft. Die Refraktion durch die Atmosphäre gilt als wichtigste Fehlerquelle für die Laufzeitberechnung.
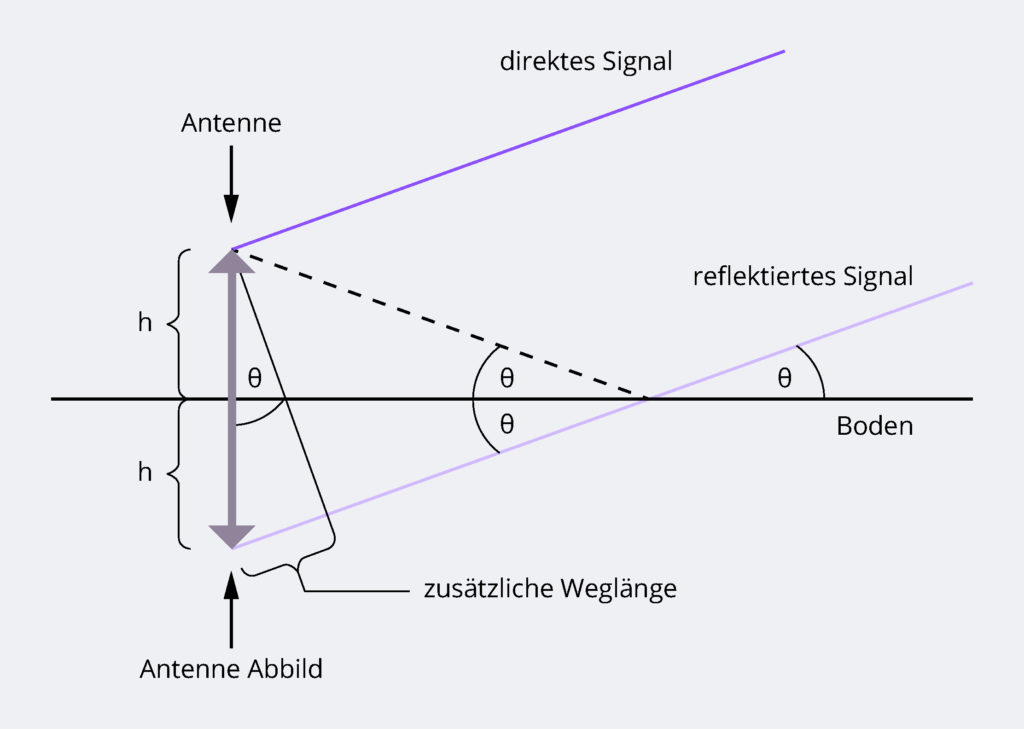
Mehrwegeffekte
Die Reflexion vom Satellitensignal durch reflektierende Objekte nahe der Empfängerantenne führt zum Mehrwegeffekt (Multipath). Das Signal wird dabei zum Beispiel durch Schnee, Wasser, Gebäude, Wald oder auf der Bodenoberfläche reflektiert und gelangt so auch indirekt zur Antenne, was zu einem Mehrfachempfang desselben Signals (Abb. 5) und somit zu einer fehlerhaften Positionsbestimmung führt. Das Ausmass des Fehlers durch Mehrwegeffekte kann mit der Codemessung bis zu 50 Meter betragen. Die Trägerphasenmessung bei hochpräzisen Echt-Zeit-Kinematik-Systemen ist mit einem Fehlerbereich von bis zu maximal 5 Zentimetern wesentlich weniger anfälliger für Mehrwegeffekte.
Abschattungen
Die Abschattung der Empfängerantenne durch Bäume, Häuser oder Berge kann die Signalverbindung zwischen Satelliten und Empfänger beeinflussen oder sogar unterbrechen. In Mitteleuropa sind die Satelliten am südlichen Horizont sichtbar, weshalb es möglichst freie Sicht in diese Richtung braucht. Moderne GNSS-Empfänger verarbeiten die Signale aller GNSS-Systeme, so dass generell immer genügend Satelliten für eine Positionsbestimmung zur Verfügung stehen. In der Schweiz können aufgrund der vorherrschenden strukturreichen Landschaft Signalabschattungen vorkommen. GNSS-Empfänger sind in der Lage, kurzzeitige Abschattungen bis zu mehreren Minuten zu überbrücken und ermöglichen damit eine störungsfreie Positionsbestimmung auch unter schwierigen Sichtverhältnissen. Die Abdeckung mit Satelliten kann über Satellitenvorhersagen für ein gewünschtes Einsatzgebiet überprüft werden.
Geschwindigkeits- und Richtungsbestimmung
Neben der Bestimmung der aktuellen Position berechnen GNSS-Empfänger ihre eigene Geschwindigkeit und Bewegungsrichtung. Dies ist bei der landwirtschaftlichen Nutzung von GNSS von grosser Bedeutung. Die Bestimmung der Geschwindigkeit ermöglicht es, geschwindigkeitsabhängige Feldarbeiten wie zum Beispiel bei der Aussaat oder dem Pflanzenschutz exakt zu steuern. Somit entfällt der Bedarf des Sporenrades oder des Radarsensors. Die Richtungsbestimmung ist bei der Anwendung von Parallelführungssystemen für die Spurführung entscheidend.
Die Berechnungen der Geschwindigkeit und der Bewegungsrichtung erfolgen über den sogenannten «Dopplereffekt». Jeder Satellit sendet sein Signal in einer bestimmten, gleichbleibenden Frequenz an den Empfänger. Der Dopplereffekt bewirkt eine Signalverschiebung (=Frequenzänderung) bei einer Annäherung/Entfernung des Empfängers Richtung Satellit. Aus der Differenz zwischen der bekannten, gleichbleibenden Sendefrequenz des Satelliten und der mit dem sich bewegenden Empfänger gemessenen Frequenz wird die relative Geschwindigkeit zum Satelliten berechnet. Diese Methode der Bestimmung der relativen Geschwindigkeit wird bei allen verfügbaren Satelliten dauernd durchgeführt und daraus die absolute Geschwindigkeit sowie die Bewegungsrichtung abgeleitet.
Die Kombination der Geschwindigkeits- und Richtungsbestimmung anhand des Dopplereffektes und der Laufzeitmessung verbessert die Positionsbestimmung, wenn der Empfänger in Bewegung ist. Durch die Geschwindigkeits- und Richtungsinformationen wird ausgehend von der aktuellen Position die zu erwartende Position berechnet, überprüft und bewertet. Diese Funktionalität verbessert unter anderem das Lenkverhalten von Fahrzeugen beim Einsatz von Parallelfahrsystemen.
Korrekturdaten
Differenzielles GPS (DGPS)
Fehler der Laufzeitmessung in einem GNSS müssen korrigiert werden, um eine für landwirtschaftliche Anwendungen minimale relative Genauigkeit von ± 30 Zentimetern erreichen zu können. Dazu werden die Satellitenpositionen um differenzielle Korrekturdaten (Zusatzbuchstabe «D») erweitert. Das in Europa relevante DGPS (abgeleitet vom US-amerikanischen GNSS «GPS») ist der European Geostationary Navigation Overlay Service (EGNOS).
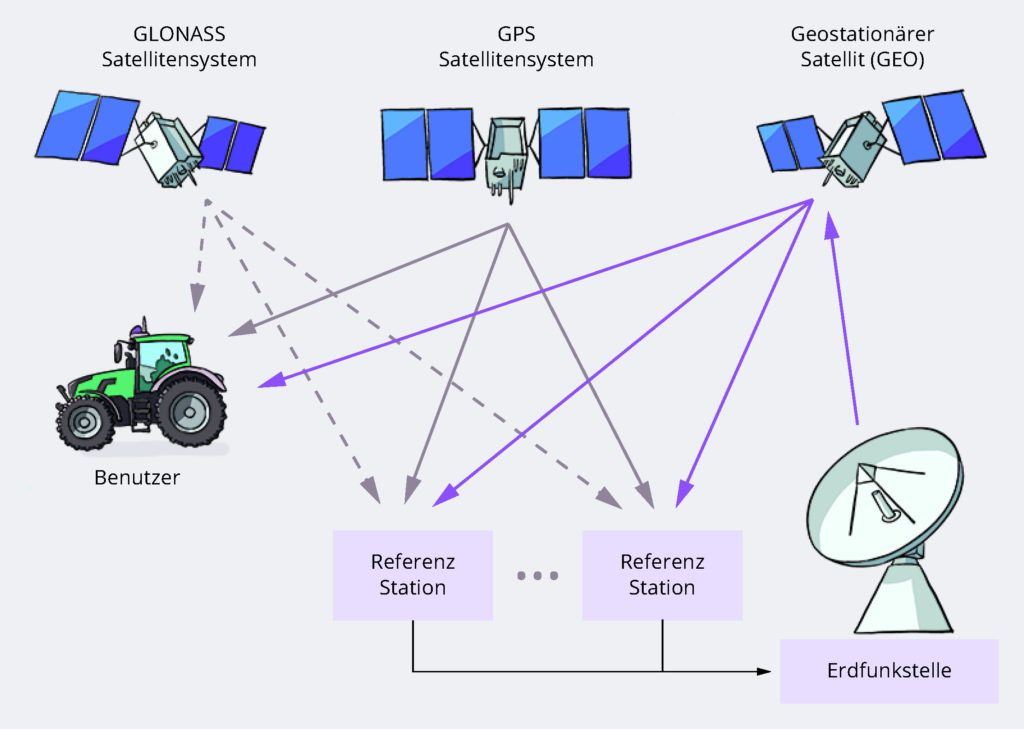
Ein Netz von exakt eingemessenen Referenzstationen auf der Erde misst dauernd die Laufzeiten zu den erreichbaren Satelliten in einem GNSS. Berechnungen der Laufzeitfehler ermöglichen die Bestimmung der Differenz zwischen theoretischer und reeller Laufzeit. Diese Differenz wird dem Anwender als Korrekturdaten zur Verfügung gestellt, welche die Fehler aus der Laufzeitmessung eines Empfängers bereinigen (Abb. 6). Die berechneten Fehlerwerte ändern sich nur langsam und es wird keine unmittelbare Echtzeitkorrektur benötigt (vgl. Echtzeit-Differenzielles GPS). In der Landwirtschaft genutzte DGPS-Korrekturdaten werden aufgrund des weit abzudeckenden und meist dezentralen Einsatzgebietes über geostationäre Satelliten gesendet. Diese Satelliten befinden sich immer an derselben Position über der Erde und können immer empfangen werden. In Europa dient das kostenlose EGNOS der European Space Agency (ESA) als herstellerunabhängiger Korrekturdatendienst in der Landwirtschaft.
Folgende Fehlerquellen können im DGPS EGNOS behoben werden: Satellitenbahnstörungen, Satellitenuhrenfehler und die Refraktion. Mehrwegeffekte und Abschattungen können durch das Korrektursignal nicht behoben werden (siehe Abschnitt «Fehlerquellen bei der Laufzeitmessung»).
Echtzeit-Differenzielles GPS (RTK-DGPS)
Für viele landwirtschaftliche Anwendungen werden sehr hohe Anforderungen an die Genauigkeit des GNSS gestellt, die mit dem Korrekturdatendienst EGNOS nicht erreicht werden. Die Berechnung der Korrekturdaten der Laufzeitmessung muss anhand empfängernaher Referenzpunkte vorgenommen werden, damit Empfänger und Referenzstation möglichst denselben Laufzeitfehlern ausgesetzt sind. Zudem kann durch Echtzeitkorrekturdaten (Real Time Kinematic, RTK) mit einer annähernd zeitgleichen Berechnung und Sendung der Korrekturdaten ein sehr hohes Niveau an absoluter Genauigkeit (± 2,5 cm, 95 %) erreicht werden (Abb. 7 bis Abb. 10). Der technische Aufwand für RTK-Systeme ist mit einem komplexeren Empfänger, einem Funkmodem mit Antenne und Korrektursignallizenzen wesentlich höher als für einen DGPS-Empfänger mit EGNOS-Genauigkeit.
Es gibt drei verschiedene Varianten hochpräziser Korrekturdienste:
- Bei den satellitengebundenen Korrekturdiensten (zum Beispiel John Deere SF3, Trimble CenterPoint® RTX) werden die Satellitenpositions- und Korrekturdaten aus dem All empfangen. Für den Nutzer hat dies den Vorteil, dass er überall auf den Korrekturdienst zugreifen kann. Je nachdem erreichen die Systeme die maximale Genauigkeit aber nicht innerhalb weniger Minuten, sondern erst nach 15 oder 30 Minuten. Beim Einsatz ist diese «Vorlaufzeit» zu berücksichtigen.
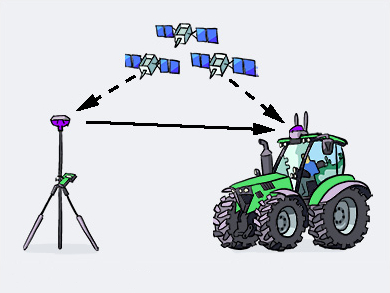
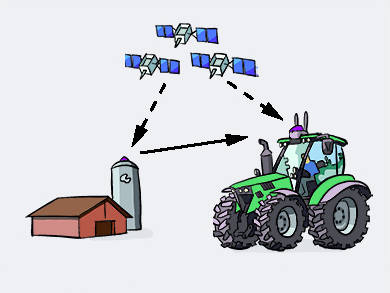
- Erdgebundene Real Time Kinematic (RTK)-Korrektursysteme verwenden für die Korrektur fixe Referenzpunkte, die sich wenige Kilometer vom Traktor entfernt befinden. Auf den Referenzpunkten steht ein GNSS-Empfänger als Basisstation. Seine Korrekturinformationen werden über Funk an den Traktor übermittelt und ergeben nach einer Verrechnung mit den Positionsdaten des GNSS-Empfängers auf dem Traktordach die korrigierte Position. Kundeneigene Basisstationen werden mit Vorteil an einem hohen Punkt (z. B. auf dem Hochsilo) montiert. Diese Möglichkeit nutzen die Parallelfahrsystemanbieter, die beispielsweise Basisstationen bei Landtechnikhändlern aufbauen und unter Verwendung mehrerer Stationen ein Korrekturnetz realisieren. Der Kunde spart sich dann die Investition in eine eigene Basisstation und bezieht das Korrektursignal via Mobilfunknetz als Dienstleistung. Mit mehreren verfügbaren Basisstationen wird der Aktionsradius grösser, was insbesondere bei weiter verteilten Betriebsflächen oder für Lohnunternehmen relevant ist.
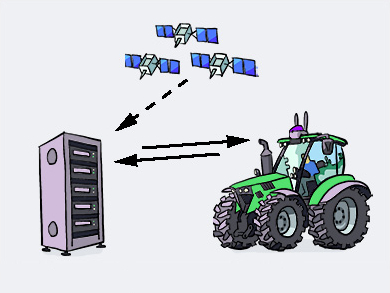
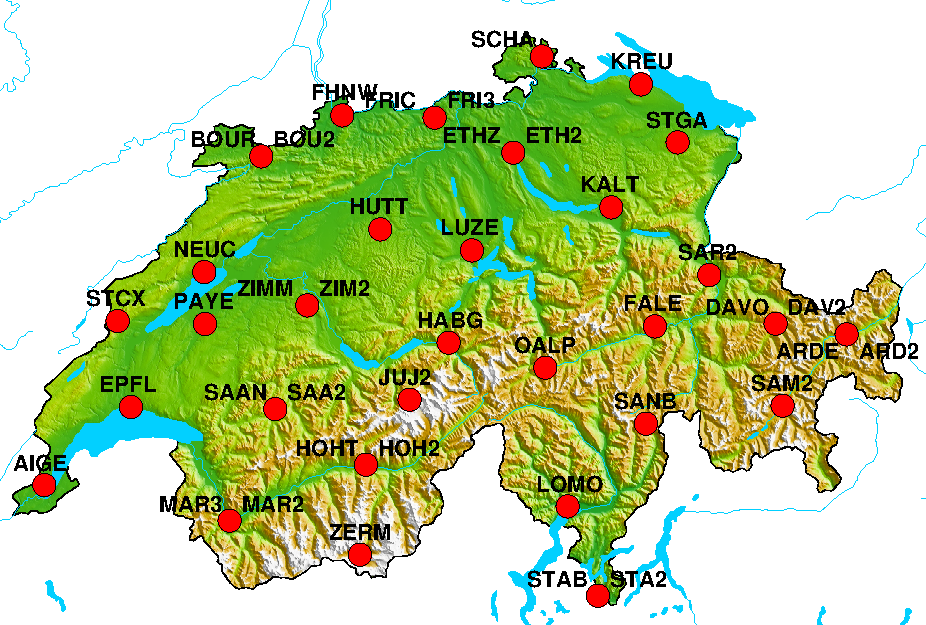
- Die sogenannten virtuellen Referenzsysteme (VRS), die ursprünglich hauptsächlich von Vermessern genutzt worden sind, bestehen aus RTK-Basisstationen im Abstand von 20 bis 30 Kilometern. Sie bilden ein landesweites oder regionales Netz (Abb. 11-14). Der Traktor hat eine permanente Mobilfunkdatenverbindung zum Rechenzentrum des Betreibers. Auf Basis der Grobposition des Traktors wird aus den Daten der umliegenden Basisstationen das Korrektursignal berechnet und an das Fahrzeug gesendet. Der grosse Vorteil ist, dass auf jeder Fläche mit Mobilfunkempfang auch das Korrektursignal zur Verfügung steht. Durch den Einsatz hochwertiger Antennen ist der Empfang auf einer Landmaschine im Vergleich zu einem Mobiltelefon besser.
Welche Korrekturlösung für den einzelnen Betrieb geeignet ist, hängt von der örtlichen Gegebenheit ab. Wenn das regionale Angebot an Korrektursignalen und die Empfangsstabilität mit Funkgeräten oder Mobilfunk auf den Schlägen stimmen, braucht man nicht unbedingt eine eigene Basisstation. In schwierigen Bedingungen wie bei hügeligem oder baumbestandenem Gelände kann es bei langen Schlägen eventuell auch vorkommen, dass keine Lösung befriedigend funktioniert. Alternative Spurführungssysteme wie Spuranreisser oder Schaummarkierer können deshalb nach wie vor notwendig sein.



RTK-Korrekturnetzwerke in der Schweiz
Genauigkeitsstufen von GNSS-Empfängern
Die Genauigkeit eines GNSS mit oder ohne Korrekturdaten wird mit dem zu erwartenden Fehlerbereich in Zentimetern oder Metern (z. B. ± 10 cm 95 %) angegeben. Dies führt oft zu Verwirrung, denn der Begriff «Genauigkeit» beschreibt nicht die absolute Genauigkeit, sondern die Spannweite des Fehlers mit einer bestimmten Wahrscheinlichkeit in Prozent.
Je nach Anwendungszweck werden unterschiedliche Lenkgenauigkeiten von ± 30 bis ± 2,5 Zentimetern benötigt (Abb. 15). Die generelle Positionsabweichung der GNSS-Signale liegt aufgrund technischer und atmosphärischer Gegebenheiten bei circa ± 3 bis 5 Metern. Für die Navigation im Auto (z. B. mit Google Maps) reicht diese Genauigkeit, aber für landwirtschaftliche Anwendungen ist sie zu ungenau. Mit Korrektursignalen wird die Genauigkeit erhöht (siehe Abschnitt «Korrekturdaten»). Je genauer und stabiler die Position sein soll, desto aufwendiger wird die benötigte Empfangs- und Korrekturtechnik.
Düngen ± 30cm

Mähen ± 10cm

Bodenbearbeitung Saat und Pflanzen ± 3cm

Haken ± 3cm

Je nach Anwendung braucht es unterschiedliche Stufen der Lenkgenauigkeit.
Bei Parallelfahrsystemen für die Landwirtschaft wird zwischen der absoluten Genauigkeit und der relativen Spur-zu-Spur-Genauigkeit unterschieden.
Für die meisten landwirtschaftlichen Anwendungen ist allerdings die relative Genauigkeit innerhalb der nächsten Minuten, die sogenannte Spur-zu-Spur-Genauigkeit, relevant (Abb. 16). Sie wird erreicht, wenn innerhalb von 15 Minuten wieder an der Vorgängerspur entlanggefahren wird (Anschlussfahren) und beträgt bei EGNOS 20 bis 30 Zentimeter. Bei sehr langsamen Fahrgeschwindigkeiten (0,1 bis 1 km/h) zum Beispiel im Gemüsebau wird die Zeitspanne von 15 Minuten bis zum Anschlussfahren aber oft überschritten. Daher ist bei solchen Anwendungen die absolute Genauigkeit des Systems relevant.
Die absolute Genauigkeit gibt an, mit welcher Genauigkeit eine Position nach einigen Tagen oder auch Jahren wiedergefunden wird (Abb. 17). Beim kostenlosen Korrektursignal European Geostationary Navigation Overlay Service (EGNOS) beträgt diese beispielsweise circa einen Meter.
| Art der Genauigkeit | Genauigkeit des Parallelfahrsystems | |
|---|---|---|
| ± 10 cm | ± 2.5 cm | |
| Die Spur-zu-Spur-Genauigkeit gibt die relative Genauigkeit innerhalb von 15 Minuten an. Bei einer Spur-zu-Spur-Genauigkeit von ± 10 Zentimetern weicht die Fahrspur in 95 Prozent der Fälle weniger als 10 Zentimeter von der zuvor gefahrenen Fahrspur ab. Parallelfahrsysteme mit geringerer Genauigkeit bieten für viele Anwendungszwecke ausreichend Präzision. |  |  |
| Die absolute Genauigkeit entspricht der wiederholbaren Genauigkeit, mit der Fahrgassen, Dämme oder Pflanzenreihen nach Tagen bis Jahren wiedergefunden und befahren werden können. Für Arbeiten mit hohen Präzisionsanforderungen braucht es Parallelfahrsysteme mit hoher Genauigkeit. |  |  |
Überblick über verschiedene Korrekturdatendienste und deren absolute und relative Genauigkeit
| Korrekturdatendienste | Anbieter | Übertragung | Endgeräte | Genauigkeit (cm) | |
|---|---|---|---|---|---|
| absolut | relativ | ||||
| EGNOS | ESA | Satellit | alle | 100 | 30 |
| Starfire I (SF1) | John Deere | Satellit | Starfire 3000/6000 | 100 | 15 |
| Range Point RTX | Trimble | Satellit | Trimble | 50 | 15 |
| TopNet Global D | Topcon | Satellit | AGI-4 | 40 | 8-10 |
| Starfire II (SF2) | John Deere | Satellit | Starfire 3000/6000 | 40 | 5-10 |
| Center Point RTX | Trimble | Satellit | Trimble | 10 | 5 |
| Starfire III (SF3) | John Deere | Satellit | Starfire 6000 | 10 | 5 |
| RTK Basisstation | diverse | Funk, Mobilfunk | diverse | 2,5 | 2,5 |
| RTK Netzwerk | diverse | Mobilfunk | diverse | 2,5 | 2,5 |
Arbeitswirtschaftliche Aspekte sind bei den GNSS-Anwendungen beschrieben (siehe Beiträge «Parallelfahrsysteme», «Satelliten- und sensorbasierte Ausbringmengensteuerung (Section Control)» und «Sensorbasierte Hacksysteme»).
Betriebswirtschaftliche Aspekte sind bei den GNSS-Anwendungen beschrieben (siehe Beiträge «Parallelfahrsysteme», «Satelliten- und sensorbasierte Ausbringmengensteuerung (Section Control)» und «Sensorbasierte Hacksysteme»).
Unter schweizerischen topografischen Bedingungen ist eine hohe Satellitenverfügbarkeit relevant. Beim Kauf von Geräten vor allem mit hochpräzisen GNSS-Empfängern ist es vorteilhaft, wenn diese die Daten möglichst vieler GNSS-Systeme verarbeiten können – auch die von jenen Systemen, die noch im Aufbau sind. Da hochwertige Empfänger eine lange Lebensdauer haben, ist der Anwender damit für die Zukunft gut gerüstet.
Die heutige breite Verfügbarkeit an untereinander kompatiblen GNSS-Systemen führt zu erhöhter Einsatzzuverlässigkeit und sinkenden Preisen auch für hochpräzise GNSS-Systeme im Genauigkeitsbereich von ± 2,5 Zentimetern. Die Vorteile von Anwendungen mit präziser Positionsbestimmung erschliessen sich einem grösseren Nutzerkreis.
In der Landwirtschaft sind GNSS-Empfangssysteme auf den Einsatzzweck von Geräten wie Parallelfahrsystemen oder satellitengesteuerter Saat, Düngung, Pflanzenschutz und Unkrautkontrolle abgestimmt und werden von den Anbietern als Paketlösungen bereitgestellt.
- Noack P., 2018. Precision Farming Smart Farming Digital Farming, Grundlagen und Anwendungsfelder. Wichmann, Berlin.
- Rothbacher M. und Zebhauser B., 2000. Einführung GPS. Tutorial zum 3. SAPOS-Symposium, IAPG/FESG, Nr.8, München.
- Mansfeld W., 1998. Satellitenortung und Navigation: Grundlagen und Anwendung globaler Satellitennavigationssysteme. Springer Vieweg, Wiesbaden.
- https://ivvgeo.uni-muenster.de/vorlesung/GPS_Script/einfuehrung_historisches.html
- Inside GNSS, 2014. New NovAtel Firmware Enables CORRECT Positioning Combined with TerraStar PPP. https://insidegnss.com/new-novatel-firmware-enables-correct-positioning-combined-with-terrastar-ppp/
- https://www.magicmaps.de/gnss-wissen/wie-funktioniert-gps/?L=0
COMPASS oder BeiDou-2 (BDS): chinesisches Satellitenortungssystem
European Geostationary Navigation Overlay Service (EGNOS): Differenzielles GNSS
Galileo: europäisches Satellitenortungssystem
Globalnaja Nawigazionnaja Sputnikowaja Sistema (GLONASS): russisches Satellitenortungssystem
Globale Navigationssatellitensysteme GNSS: Überbegriff der Satellitenortungssysteme verschiedener Anbieter
Global Positioning System (GPS): Satellitenortungssystem der USA
Real Time Kinematic (RTK): Echt-Zeit-Kinematik-Systeme
Quasi-Zenit-Satelliten-System (QZSS): = japanisches Satellitenortungssystem
Hinweis
Die Texte und das Bildmaterial stammen aus dem Fachmedium «Digitale Technologien in der Landwirtschaft», das von der Edition-lmz AG 2021 herausgegeben wurde.