Thèmes
Systèmes mondiaux de navigation par satellite
Les systèmes mondiaux de navigation par satellite (GNSS) constituent la base de la localisation et de la navigation des véhicules et des équipements agricoles. Les indications de vitesse, de direction et de position exacte fournies par le GNSS jouent un rôle central dans l'agriculture de précision. Pour l'utilisation dans l'agriculture, il faut parfois des signaux de correction complémentaires et payants.
Cet article a été traduit automatiquement
Aperçu
- Les systèmes mondiaux de navigation par satellite (GNSS) constituent la base de la localisation et de la navigation des véhicules et des équipements agricoles. Les indications de vitesse, de direction et de position exacte fournies par le GNSS jouent un rôle central dans la gestion précise des terres (Precision Farming, Smart Farming, Farming 4.0).
- Les systèmes utilisés pour la navigation par satellite sont le Global Positioning System (Navstar-GPS) des États-Unis, le Globalnaja Nawigazionnaja Sputnikowaja Sistema (GLONASS) de Russie, le système européen Galileo, le système chinois COMPASS/BeiDou-2 (BDS) et le système japonais de satellites Quasi-Zenit (QZSS). Les modes de fonctionnement des différents GNSS sont fondamentalement les mêmes et ne diffèrent que par des détails techniques.
- Les signaux de position GNSS sont utilisés par exemple pour guider les tracteurs et les machines de récolte équipés de systèmes de conduite parallèle (voir l’article « Systèmes de conduite parallèle ») et pour piloter les semoirs, les pulvérisateurs et les bineuses (voir l’article « Systèmes de bineuse basés sur des capteurs »).
- Pour l’utilisation dans l’agriculture, il faut parfois des signaux de correction complémentaires et payants pour atteindre la grande précision de positionnement exigée.
- Détermination de la vitesse pour la commande de l’appareil (par ex. travaux de semis, de fertilisation ou de protection des plantes)
- Détermination de la position absolue (par ex. B. Mesure des parcelles ou cartographie des rendements, exploitation spécifique des surfaces partielles, voies de circulation utilisées en permanence (Controlled Traffic Farming CTF)
- Détermination de la position relative (par ex. systèmes de conduite en parallèle/commande de tronçons Section Control)
Principes de fonctionnement Détermination de la position
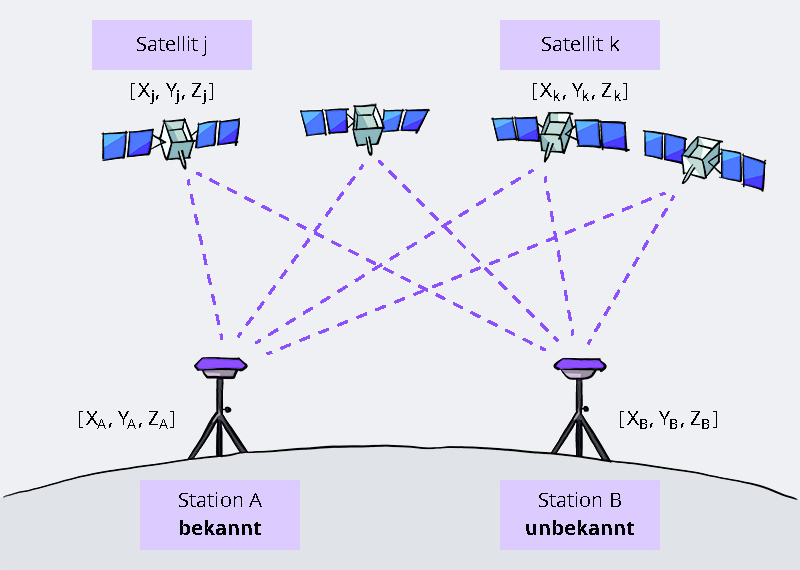
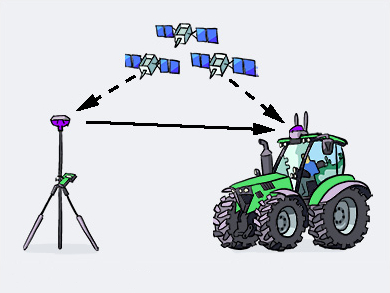
Trois composants sont nécessaires pour déterminer la position sur la terre : Des satellites dans l’espace, une station terrestre servant de centre de contrôle (station A) et un récepteur (Station B) (Fig. 1).
Les satellites d’un GNSS tournent autour de la Terre sur des orbites fixes connues. Ils comprennent une horloge atomique de haute précision, une unité de calcul, une unité d’émission et une unité de réception. Les orbites des satellites sont régulièrement calculées et corrigées par les centres de contrôle via les unités d’émission et de réception. Un satellite envoie son heure et sa position exactes, qui sont traitées par le récepteur GNSS installé sur le véhicule ou l’équipement agricole.
Le récepteur dispose d’une antenne et d’une unité de calcul qui permet de calculer sa position à partir des heures et des positions envoyées par les satellites. La position du récepteur est déterminée par la mesure du temps de propagation des signaux radio émis par les satellites.
Pour déterminer la position d’un récepteur avec les coordonnées X, Y, Z (longitude, latitude, altitude), il faut plusieurs satellites qui émettent des signaux différents. C’est la seule façon pour le récepteur de reconnaître les différents satellites et de déterminer correctement sa position à l’aide des coordonnées X, Y et Z. Les satellites ont une distance différente du récepteur et les signaux émis mettent plus ou moins de temps à arriver au récepteur. Le récepteur calcule sa position à partir des positions connues des satellites et des temps de propagation des signaux de différentes longueurs.
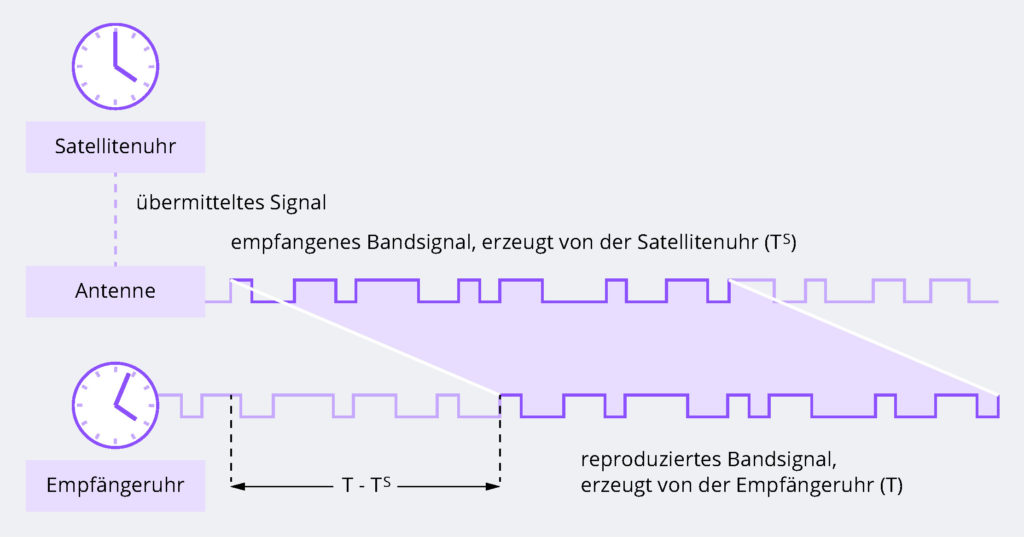
Chaque satellite émet une séquence de bits définie pour lui sous forme de signal en bande. Ces signaux en bande avec les satellites correspondants sont connus du récepteur. La mesure de code permet de mesurer le temps de propagation d’un signal de bande en utilisant le principe de la clé et du trou. Le récepteur compare le signal de bande reçu (clé) avec un signal identique qu’il a lui-même généré (trou). Il décale dans le temps le signal qu’il génère jusqu’à ce que les signaux coïncident (fig. 2). Le décalage temporel correspond au temps de propagation du signal. La mesure de code est utilisée par tous les récepteurs GNSS.
Une autre possibilité de calculer le temps de propagation d’un signal est la mesure de la phase de la porteuse. Pour cela, on utilise la phase d’un ou de deux signaux (décalage de l’oscillation par rapport au point zéro de l’oscillation). La mesure de la phase de la porteuse est plus complexe que la mesure du code et est utilisée dans les récepteurs haut de gamme. Elle offre un positionnement très précis et constitue la base du positionnement de la plus haute précision, les systèmes cinématiques en temps réel (RTK).
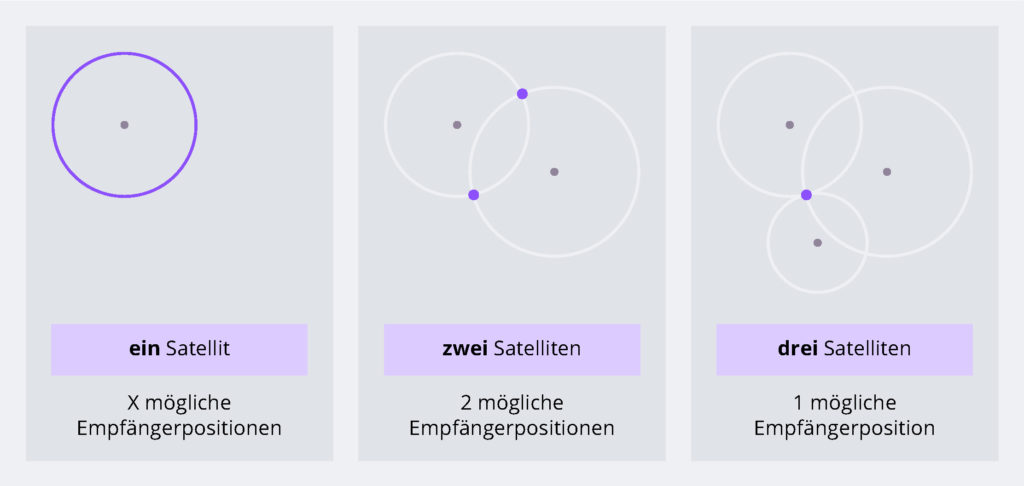
Pour déterminer la position unique d’un récepteur, il faut au moins trois satellites disponibles (ill. 3). Le principe de la mesure par code permet à un récepteur de déterminer la distance qui le sépare d’un satellite. Il n’est toutefois pas possible de déterminer la position du récepteur sur la Terre avec un seul signal. Lorsque deux signaux sont détectés, les distances calculées donnent deux points d’intersection et donc deux positions possibles du récepteur. Ce n’est qu’en calculant trois temps de parcours différents des signaux, combinés aux indications de position précises des satellites, qu’il est possible de déterminer sans équivoque la position du récepteur. Cette méthode de détermination de la position est appelée trilatération. L’acquisition d’un quatrième satellite permet en outre de calculer l’altitude du récepteur (altitude au-dessus du niveau de la mer).
Un plus grand nombre de satellites disponibles ne se traduit pas par une plus grande précision, mais par une augmentation de la disponibilité du signal. Dans le système GPS américain, une trentaine de satellites tournent autour de la Terre sur différentes orbites. Il modifie en permanence les satellites visibles par le récepteur et utilisés pour le calcul de la position. Pour une détermination fiable de la position, huit à dix satellites devraient donc être « visibles » pour le récepteur.
Sources d’erreur lors de la mesure du temps de propagation
Erreur de montre
Les signaux radio se propagent dans l’espace à une vitesse proche de celle de la lumière et de petites imprécisions de mesure du temps de propagation du signal entraînent de grands écarts de position. Les écarts mineurs, dus notamment aux effets de la gravité, entre les horloges atomiques des satellites utilisées pour mesurer le temps de parcours et les stations terrestres sont corrigés en permanence.
Erreur de trajectoire du satellite
Les satellites GNSS font une fois le tour de la Terre en douze heures environ sur des orbites fixes. Ces orbites peuvent être calculées mathématiquement et déterminées sans ambiguïté. En raison d’effets physiques, les satellites présentent de légers écarts par rapport à la trajectoire calculée.
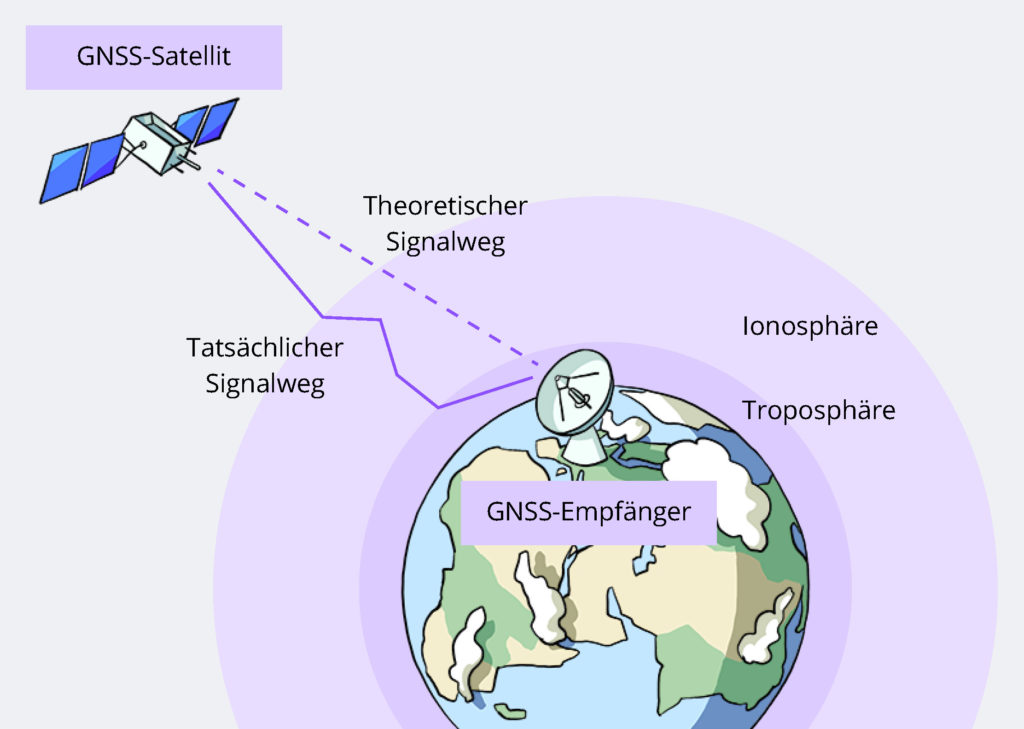
Réfraction ionos et troposphérique
L’ionosphère et la troposphère sont des parties de l’atmosphère situées au-dessus de la surface de la Terre (ill. 4). La réfraction de ces sphères décrit l’influence sur la direction et la vitesse de déplacement des signaux satellites dans l’atmosphère. Dans l’ionosphère (80-1000 km au-dessus du niveau de la mer), les électrons libres influencent le signal du satellite dans sa direction et sa vitesse. La troposphère se situe entre 0 et 15 kilomètres au-dessus de la mer et fausse la détermination de la position absolue en fonction de la pression atmosphérique, de la teneur en eau et de la température de l’air. La réfraction par l’atmosphère est considérée comme la principale source d’erreur pour le calcul du temps de parcours.
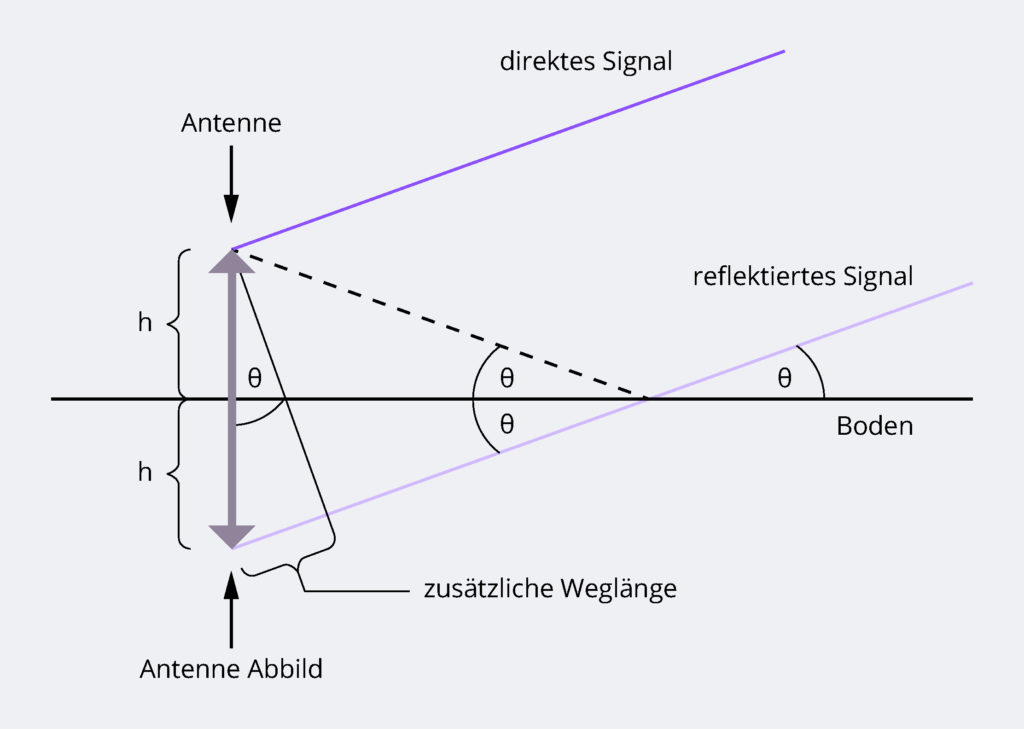
Effets à trajets multiples
La réflexion du signal satellite par des objets réfléchissants proches de l’antenne réceptrice entraîne un effet de trajets multiples (multipath). Le signal est alors réfléchi par exemple par la neige, l’eau, les bâtiments, la forêt ou sur la surface du sol et parvient aussi indirectement à l’antenne, ce qui conduit à une réception multiple du même signal (ill. 5) et donc à une détermination erronée de la position. L’ampleur de l’erreur due aux effets de trajets multiples peut aller jusqu’à 50 mètres avec la mesure par code. La mesure de la phase de la poutre dans les systèmes cinématiques en temps réel de haute précision est beaucoup moins sujette aux effets de trajets multiples, avec une marge d’erreur pouvant atteindre 5 centimètres au maximum.
Ombrages
L’ombrage de l’antenne du récepteur par des arbres, des maisons ou des montagnes peut influencer ou même interrompre la connexion du signal entre le satellite et le récepteur. En Europe centrale, les satellites sont visibles à l’horizon sud, c’est pourquoi il faut avoir une vue aussi dégagée que possible dans cette direction. Les récepteurs GNSS modernes traitent les signaux de tous les systèmes GNSS, de sorte qu’en général, il y a toujours suffisamment de satellites disponibles pour déterminer une position. En Suisse, des ombres de signal peuvent se produire en raison de la prédominance d’un paysage riche en structures. Les récepteurs GNSS sont capables de surmonter des occultations momentanées pouvant aller jusqu’à plusieurs minutes, ce qui permet de déterminer une position sans interférence, même dans des conditions de visibilité difficiles. La couverture par les satellites peut être vérifiée par le biais de prévisions satellites pour une zone d’utilisation souhaitée.
Détermination de la vitesse et de la direction
Outre la détermination de la position actuelle, les récepteurs GNSS calculent leur propre vitesse et direction de déplacement. Cela revêt une grande importance dans le cadre de l’utilisation agricole du GNSS. La détermination de la vitesse permet de piloter avec précision les travaux au champ en fonction de la vitesse, par exemple lors du semis ou de la protection phytosanitaire. Il n’est donc plus nécessaire d’utiliser la roue à éperons ou le capteur radar. La détermination de la direction est essentielle pour le guidage lors de l’utilisation de systèmes de guidage parallèle.
Les calculs de la vitesse et de la direction du mouvement se font par ce que l’on appelle « l’effet Doppler ». Chaque satellite envoie son signal au récepteur à une fréquence déterminée et constante. L’effet Doppler provoque un décalage du signal (= changement de fréquence) lorsque le récepteur se rapproche/ s’éloigne du satellite. La vitesse relative par rapport au satellite est calculée à partir de la différence entre la fréquence d’émission connue et constante du satellite et la fréquence mesurée par le récepteur en mouvement. Cette méthode de détermination de la vitesse relative est appliquée en permanence à tous les satellites disponibles et en déduit la vitesse absolue ainsi que la direction du mouvement.
La combinaison de la détermination de la vitesse et de la direction à l’aide de l’effet Doppler et de la mesure du temps de propagation améliore la détermination de la position lorsque le récepteur est en mouvement. Grâce aux informations sur la vitesse et la direction, la position attendue est calculée, vérifiée et évaluée à partir de la position actuelle. Cette fonctionnalité améliore entre autres le comportement de la direction des véhicules lors de l’utilisation de systèmes de conduite parallèle.
Données de correction
GPS différentiel (DGPS)
Les erreurs de mesure du temps de propagation dans un GNSS doivent être corrigées afin de pouvoir atteindre une précision relative minimale de ± 30 centimètres pour les applications agricoles. Pour ce faire, les positions des satellites sont complétées par des données de correction différentielle (lettre supplémentaire « D »). Le DGPS pertinent en Europe (dérivé du GNSS américain « GPS ») est le European Geostationary Navigation Overlay Service (EGNOS).
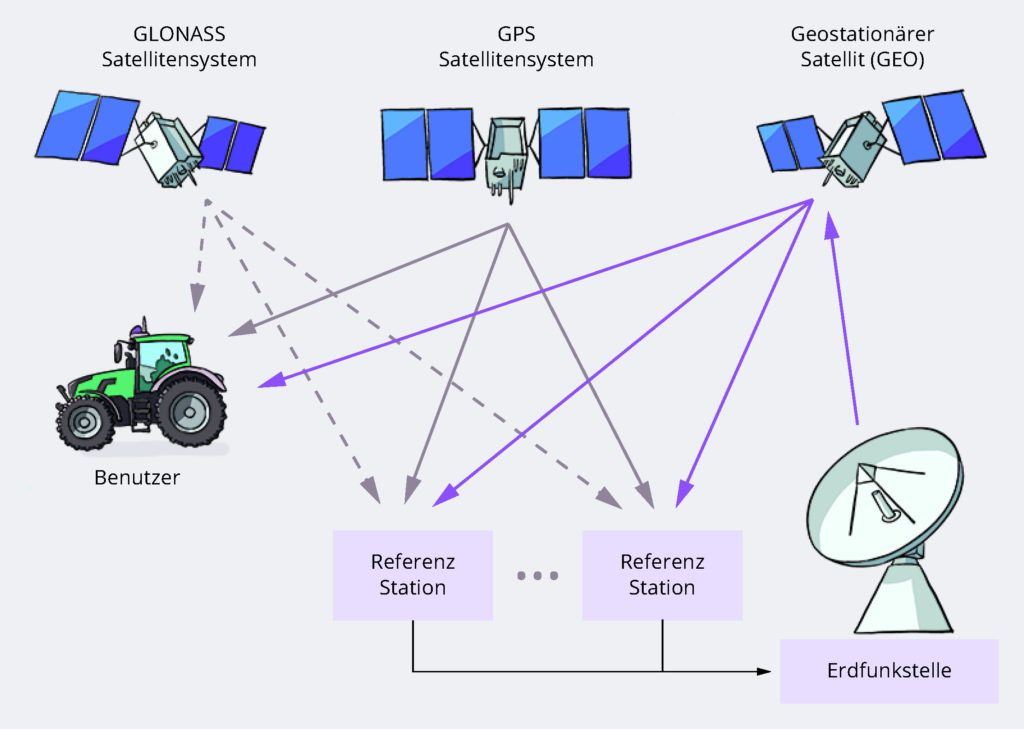
Un réseau de stations de référence mesurées avec précision sur la terre mesure en permanence les temps de parcours vers les satellites accessibles dans un GNSS. Les calculs des erreurs de temps de propagation permettent de déterminer la différence entre le temps de propagation théorique et le temps de propagation réel. Cette différence est mise à la disposition de l’utilisateur sous forme de données de correction, qui corrigent les erreurs résultant de la mesure du temps de propagation d’un récepteur (fig. 6). Les valeurs d’erreur calculées ne changent que lentement et aucune correction immédiate en temps réel n’est nécessaire (cf. GPS différentiel en temps réel). Les données de correction DGPS utilisées dans l’agriculture sont envoyées via des satellites géostationnaires en raison de la zone d’utilisation étendue et généralement décentralisée à couvrir. Ces satellites se trouvent toujours à la même position au-dessus de la terre et peuvent toujours être reçus. En Europe, le système gratuit EGNOS de l’Agence spatiale européenne (ESA) sert de service de données de correction indépendant des fabricants dans le domaine agricole.
Les sources d’erreur suivantes peuvent être corrigées dans le DGPS EGNOS : Les perturbations de l’orbite des satellites, les erreurs d’horloge des satellites et la réfraction. Les effets de trajets multiples et les ombres ne peuvent pas être éliminés par le signal de correction(voir le paragraphe « Sources d’erreurs lors de la mesure du temps de propagation »).
GPS différentiel en temps réel (RTK-DGPS)
Pour de nombreuses applications agricoles, les exigences en matière de précision du GNSS sont très élevées et ne peuvent pas être atteintes avec le service de données de correction EGNOS. Le calcul des données de correction de la mesure du temps de propagation doit être effectué à l’aide de points de référence proches du récepteur, afin que le récepteur et la station de référence soient exposés, dans la mesure du possible, aux mêmes erreurs de temps de propagation. De plus, les données de correction en temps réel (Real Time Kinematic, RTK), avec un calcul et un envoi des données de correction quasiment simultanés, permettent d’atteindre un très haut niveau de précision absolue (± 2,5 cm, 95 %) (fig. 7 à fig. 10). Avec un récepteur plus complexe, un modem radio avec antenne et des licences de signaux de correction, l’investissement technique pour les systèmes RTK est beaucoup plus élevé que pour un récepteur DGPS avec la précision EGNOS.
Il existe trois variantes différentes de services de correction de haute précision :
- Pour les les services de correction par satellite (par exemple John Deere SF3, Trimble CenterPoint® RTX), les données de position et de correction par satellite sont reçues depuis l’espace. Pour l’utilisateur, cela présente l’avantage de pouvoir accéder au service de correction où qu’il se trouve. Selon les cas, les systèmes n’atteignent toutefois pas la précision maximale en quelques minutes, mais seulement après 15 ou 30 minutes. Lors de l’utilisation, il faut tenir compte de ce « délai d’attente ».
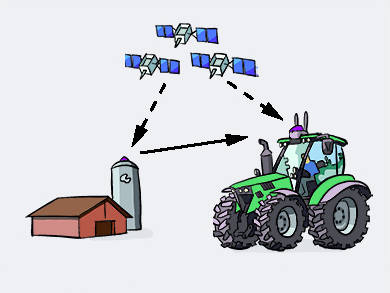
- Les systèmes de correction RTK (Real Time Kinematic) basés sur la terre ont des points de référence fixes. utilisent pour la correction des points de référence fixes situés à quelques kilomètres du tracteur. Un récepteur GNSS se trouve sur les points de référence et sert de station de base. Ses informations de correction sont transmises par radio au tracteur et donnent la position corrigée après un calcul avec les données de position du récepteur GNSS sur le toit du tracteur. Les stations de base propres au client sont de préférence installées à un point élevé (par exemple sur le silo en hauteur). Cette possibilité est utilisée par les fournisseurs de systèmes de conduite parallèle, qui installent par exemple des stations de base chez les concessionnaires de matériel agricole et réalisent un réseau de correction en utilisant plusieurs stations. Le client économise alors l’investissement dans une propre station de base et reçoit le signal de correction via le réseau de téléphonie mobile en tant que service. Avec plusieurs stations de base disponibles, le rayon d’action est plus grand, ce qui est particulièrement pertinent pour les surfaces d’exploitation plus dispersées ou pour les entreprises de sous-traitance.
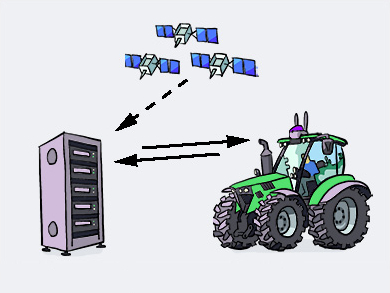
- Les soi-disant systèmes de référence virtuels (VRS) Les systèmes de référence régionaux (SRR), qui étaient à l’origine principalement utilisés par les géomètres, sont constitués de stations de base RTK espacées de 20 à 30 kilomètres. Ils forment un réseau national ou régional (fig. 11-14). Le tracteur dispose d’une connexion de données mobile permanente avec le centre de données de l’opérateur. Sur la base de la position approximative du tracteur, le signal de correction est calculé à partir des données des stations de base environnantes et envoyé au véhicule. Le grand avantage est que le signal de correction est également disponible sur chaque surface couverte par la téléphonie mobile. Grâce à l’utilisation d’antennes de haute qualité, la réception sur une machine agricole est meilleure qu’avec un téléphone portable.
La solution de correction adaptée à chaque établissement dépend de la situation locale. Si l’offre régionale de signaux de correction et la stabilité de la réception avec les radios ou la téléphonie mobile sont bonnes sur les coups, on n’a pas forcément besoin d’une propre station de base. Dans des conditions difficiles, telles que des terrains vallonnés ou arborés, il se peut aussi qu’aucune solution ne fonctionne de manière satisfaisante lors de longues battues. Des systèmes de guidage alternatifs, tels que des traceurs ou des marqueurs en mousse, peuvent donc encore être nécessaires.
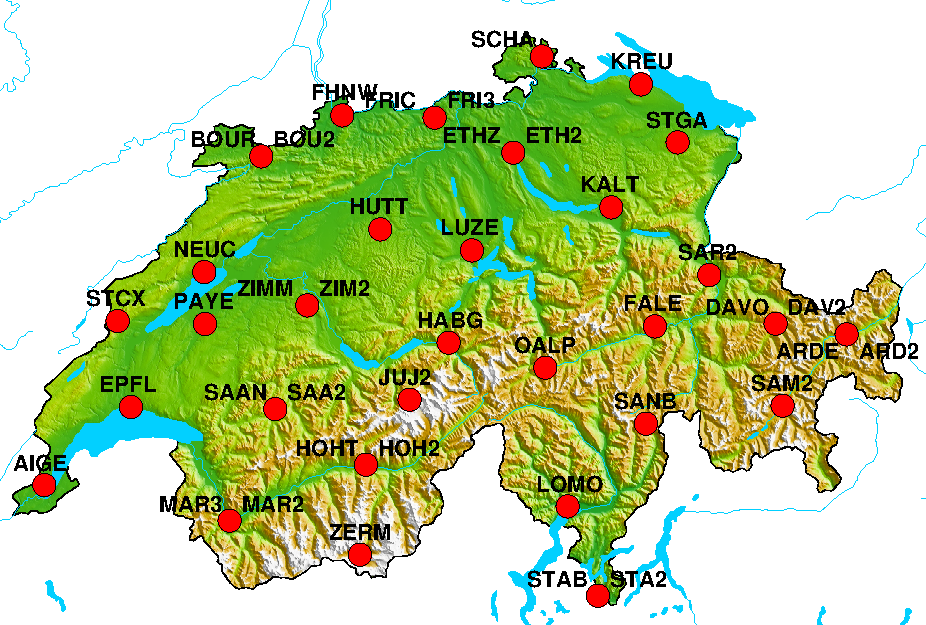



Réseaux de correction RTK en Suisse
Niveaux de précision des récepteurs GNSS
La précision d’un GNSS, avec ou sans données de correction, est indiquée par la marge d’erreur attendue en centimètres ou en mètres (par exemple ± 10 cm 95 %). Cela prête souvent à confusion, car le terme « précision » ne décrit pas la précision absolue, mais l’étendue de l’erreur avec une certaine probabilité en pourcentage.
Selon l’application, différentes précisions de direction de ± 30 à ± 2,5 centimètres sont nécessaires (fig. 15). L’écart de position général des signaux GNSS est d’environ ± 3 à 5 mètres en raison des conditions techniques et atmosphériques. Cette précision est suffisante pour la navigation en voiture (par exemple avec Google Maps), mais elle est trop imprécise pour les applications agricoles. Les signaux de correction permettent d’augmenter la précision(voir la section « Données de correction »). Plus la position doit être précise et stable, plus la technique de réception et de correction nécessaire est coûteuse.
Fertilisation ± 30cm

fauchage ± 10cm

travail du sol semis et plantation ± 3cm

crochet ± 3cm

Selon l’application, il faut différents niveaux de précision de direction.
Dans les systèmes de conduite parallèle pour l’agriculture, on fait la distinction entre la précision absolue et la précision relative de voie à voie.
Cependant, pour la plupart des applications agricoles, c’est la précision relative dans les minutes qui suivent, appelée précision de voie à voie, qui est pertinente (Fig. 16). Elle est atteinte lorsque l’on longe à nouveau la voie précédente dans un délai de 15 minutes (trajet de raccordement) et est de 20 à 30 centimètres pour EGNOS. Cependant, à des vitesses d’avancement très lentes (0,1 à 1 km/h), par exemple dans les cultures maraîchères, le délai de 15 minutes avant le raccordement est souvent dépassé. C’est pourquoi, dans de telles applications, la précision absolue du système est pertinente.
La précision absolue indique avec quelle précision une position est retrouvée après quelques jours ou même quelques années (Fig. 17). Pour le signal de correction gratuit European Geostationary Navigation Overlay Service (EGNOS), par exemple, est d’environ un mètre.
| Type de précision | Précision du système de conduite parallèle | |
|---|---|---|
| ± 10 cm | ± 2,5 cm | |
| Le site Précision de piste à piste indique la précision relative dans les 15 minutes. Avec une précision de ± 10 centimètres d’une voie à l’autre, la voie de circulation s’écarte de moins de 10 centimètres de la voie précédemment empruntée dans 95% des cas. Les systèmes de conduite parallèle de moindre précision offrent une précision suffisante pour de nombreuses applications. |  |  |
| Le site précision absolue correspond à la précision répétable avec laquelle les jalonnages, les buttes ou les rangées de plantes peuvent être retrouvés et parcourus après plusieurs jours ou années. Pour les travaux nécessitant une grande précision, il faut des systèmes de déplacement parallèle d’une grande précision. |  |  |
Aperçu des différents services de données de correction et de leur précision absolue et relative
| Services de données de correction | Fournisseur | Transmission | Terminaux | Précision (cm) | |
|---|---|---|---|---|---|
| absolument | relativement | ||||
| EGNOS | ESA | Satellite | tous | 100 | 30 |
| Starfire I (SF1) | John Deere | Satellite | Starfire 3000/6000 | 100 | 15 |
| Range Point RTX | Trimble | Satellite | Trimble | 50 | 15 |
| TopNet Global D | Topcon | Satellite | AGI-4 | 40 | 8-10 |
| Starfire II (SF2) | John Deere | Satellite | Starfire 3000/6000 | 40 | 5-10 |
| Point central RTX | Trimble | Satellite | Trimble | 10 | 5 |
| Starfire III (SF3) | John Deere | Satellite | Starfire 6000 | 10 | 5 |
| Station de base RTK | divers | Radio, téléphonie mobile | divers | 2,5 | 2,5 |
| Réseau RTK | divers | Téléphonie mobile | divers | 2,5 | 2,5 |
Les aspects liés à l’économie du travail sont décrits dans les applications GNSS (voir les articles « Systèmes de conduite en parallèle »,« Contrôle du débit (Section Control) basé sur des satellites et des capteurs » et « Systèmes de binage basés sur des capteurs « ).
Les aspects de gestion d’entreprise sont décrits dans les applications GNSS (voir les articles « Systèmes de conduite en parallèle », « Contrôle du débit (Section Control) basé sur des satellites et des capteurs » et « Systèmes de binage basés sur des capteurs »).
Dans les conditions topographiques suisses, une disponibilité élevée des satellites est pertinente. Lors de l’achat d’un équipement, surtout s’il est équipé de récepteurs GNSS de haute précision, il est préférable qu’il puisse traiter les données du plus grand nombre possible de systèmes GNSS, y compris ceux qui sont encore en cours de développement. Comme les récepteurs de haute qualité ont une longue durée de vie, l’utilisateur est ainsi bien équipé pour l’avenir.
La large disponibilité actuelle de systèmes GNSS compatibles entre eux se traduit par une fiabilité opérationnelle accrue et une baisse des prix, même pour les systèmes GNSS de haute précision dans la plage de précision de ± 2,5 centimètres. Les avantages des applications avec positionnement précis s’ouvrent à un plus grand nombre d’utilisateurs.
Dans l’agriculture, les systèmes de réception GNSS sont adaptés à l’utilisation d’équipements tels que les systèmes de conduite parallèle ou les semis, la fertilisation, la protection des cultures et le contrôle des mauvaises herbes par satellite, et sont fournis par les fournisseurs sous forme de solutions groupées.
- Noack P., 2018. Agriculture de précision Agriculture intelligente Agriculture numérique, bases et champs d’application. Wichmann, Berlin.
- Rothbacher M. et Zebhauser B., 2000. Introduction au GPS. Tutoriel sur le 3e symposium SAPOS, IAPG/FESG, n° 8, Munich.
- Mansfeld W., 1998. Localisation et navigation par satellite : Principes de base et application des systèmes globaux de navigation par satellite. Springer Vieweg, Wiesbaden.
- https://ivvgeo.uni-muenster.de/vorlesung/GPS_Script/einfuehrung_historisches.html
- Inside GNSS, 2014. Le nouveau firmware NovAtel permet le positionnement CORRECT combiné au PPP TerraStar. https://insidegnss.com/new-novatel-firmware-enables-correct-positioning-combined-with-terrastar-ppp/
- https://www.magicmaps.de/gnss-wissen/wie-funktioniert-gps/?L=0
COMPASS ou BeiDou-2 (BDS) : système chinois de localisation par satellite
Service européen de navigation par recouvrement géostationnaire (EGNOS) : GNSS différentiel
Le système Galileo : système européen de positionnement par satellite
Globalnaja Nawigazionnaja Sputnikowaja Sistema (GLONASS) : système russe de positionnement par satellite
Systèmes globaux de navigation par satellite GNSS : Terme générique des systèmes de positionnement par satellite de différents fournisseurs
Système de positionnement global (GPS) : Système de positionnement par satellite des États-Unis
Cinématique en temps réel (RTK) : Systèmes cinématiques en temps réel
Système de satellites Quasi-Zenit (QZSS) : = système japonais de positionnement par satellite
Remarque
Les textes et les images proviennent du média spécialisé « Technologies numériques dans l’agriculture », publié par Edition-lmz SA 2021.