Thèmes
Transmission numérique de données normalisée ISOBUS dans les machines agricoles
L'échange des données est au coeur de l'agriculture numérique. Pour les applications de machines dans la production végétale, il existe une interface spéciale: l'ISOBUS. Il s'agit d'une interface standardisée pour la transmission de données et d'énergie électrique entre les tracteurs, les machines agricoles, les appareils externes tels que les récepteurs satellites et l'infrastructure pour le traitement ultérieur des données.
Aperçu
- L’échange des données est au coeur de l’agriculture numérique. Pour les applications de machines dans la production végétale, il existe une interface spéciale: l’ISOBUS. Celui-ci est comparable, en termes de développement et de fonctions, à l’Universal Serial Bus (USB) utilisé au quotidien dans les applications informatiques pour connecter des appareils externes tels que des imprimantes ou des scanners.
- L’ISOBUS est une interface standardisée pour la transmission de données et d’énergie électrique entre les tracteurs, les machines agricoles, les appareils externes tels que les récepteurs satellites et l’infrastructure pour le traitement ultérieur des données. Il est défini dans la norme ISO 11783.
- La base de l’ISOBUS est le bus CAN (CAN = Controller Area Network). Développé par Bosch et Intel, il est utilisé depuis le milieu des années 1980 dans les applications automobiles, c’est-à-dire par exemple dans les voitures et les machines agricoles, pour l’échange de données entre les différents composants électroniques. Le bus CAN se contente de deux câbles torsadés, il est à l’abri des perturbations et facile à poser.
- L’ISOBUS permet de relier et d’utiliser des machines et des tracteurs à régulation électronique, quel que soit le fabricant.
Domaines d’application et avantages
La mise en réseau des machines agricoles, tous constructeurs confondus, via une interface unique, permet une utilisation efficace des données.
- Les composants coûteux sur le tracteur, tels que les écrans de contrôle, le câblage ou les récepteurs satellites, peuvent être utilisés pour les outils portés, il n’est pas nécessaire d’avoir des composants séparés pour chaque machine individuelle.
- Un guidage uniforme de l’utilisateur sur les moniteurs simplifie l’utilisation des appareils.
- L’ISOBUS permet de mettre en œuvre des applications d’agriculture de précision (voir l’article « Exploitation spécifique à la surface partielle« ).
Aperçu de la technologie
Naissance de l’ISOBUS
Depuis les années 1970, les machines agricoles sont équipées de composants électroniques qui peuvent être reliés entre eux et échanger des données et de l’énergie électrique. Les systèmes électroniques ainsi créés étaient développés par les fabricants respectifs et n’étaient que rarement compatibles avec les appareils d’autres fabricants. Cela signifiait que pour exploiter les possibilités de l’électronique, tous les composants devaient être du même fabricant. La liberté de choix des agriculteurs s’en trouvait fortement limitée et il fallait souvent acheter une unité de commande pour chaque machine, bien que les fonctions soient comparables sur tous les moniteurs. Les développements continus de l’électronique agricole offraient des fonctions de plus en plus étendues, mais les adaptations spécifiques aux machines sur les tracteurs et les véhicules devenaient de plus en plus compliquées et coûteuses, en particulier lorsque les différentes machines provenaient de différents fabricants. C’est pourquoi des efforts ont été entrepris pour standardiser au moins les fonctions de base telles que le type de transmission des données (bus CAN), les interfaces (connecteurs et câblage) et les formats de données, afin de permettre une utilisation des appareils de base par tous les fabricants.
A partir de 2001, l’International Organisation for Standardization a créé la norme ISO 11783 sous le nom d’ISOBUS à partir de parties de la norme SAE J1939 (standardisation de la communication dans les engins mobiles via un bus CAN par la Society of Automotive Engineers) ainsi que du système de bus agricole (LBS, DIN 9684) en Allemagne (Prof. Dr H. Auernhammer, TU München) (voir tableau ci-dessous).
| Norme ISO 11783, ISOBUS |
| Système de bus CAN sophistiqué spécialement conçu pour les machines agricoles avec échange de données vers des PC externes |
| LBS (système de BUS agricole) | SAE J1939 |
| Normalisation de la transmission de données spécifique aux machines agricoles (système simple CAN-Bus) | Normalisation générale de la transmission de données sur les véhicules mobiles (système complexe de bus CAN) |
Norme ISOBUS
La norme ISOBUS, qui compte plusieurs centaines de pages, régit tous les composants importants pour l’application normalisée de l’agriculture de précision. Il contient 14 chapitres et peut être divisé en parties « Transmission physique des données », « Réseau », « Données », « Diagnostic » et « Fonctions » (voir illustration ci-dessous). Le mode de transmission des données et de l’énergie électrique, les interfaces nécessaires à cet effet ainsi que certaines fonctions de l’agriculture de précision telles que la commutation des tronçons, l’exploitation spécifique à la surface partielle, la gestion des données et les affichages sur les moniteurs sont ainsi normalisés. Toutes les autres fonctions sur les machines agricoles, comme la disposition des éléments de commande, l’étendue des fonctions ou le positionnement des capteurs et des actionneurs, ne sont pas définies.

Les groupes « Transmission de données physiques » et « Fonctions » sont les plus pertinents pour les applications pratiques dans l’agriculture. Les autres thèmes traitent des aspects liés au développement et à la programmation et ne sont que rarement perçus par les utilisateurs.
La norme ISOBUS laisse aux développeurs une marge de manœuvre relativement importante en termes d’adaptation et d’interprétation. Il en résulte qu’un masque de commande (l’interface utilisateur affichée sur le moniteur) s’affiche exactement comme prévu sur le moniteur d’un fabricant, avec une disposition correcte et compréhensible des touches de fonction et des boutons, alors que l’affichage du même masque de commande sur un autre moniteur d’un autre fabricant ou d’un autre type n’a aucun sens.
Il est de la responsabilité et de l’intérêt du fabricant de l’appareil de veiller à ce que son appareil s’affiche correctement sur tous les moniteurs de tous les fabricants, si possible. Et inversement, il est dans l’intérêt des fabricants de moniteurs que tous les appareils puissent être utilisés correctement dans la mesure du possible.
Cette responsabilité personnelle nécessite des accords ciblés. Afin d’optimiser la coordination entre les différents acteurs, d’organiser des tests de conformité et de développer la norme ISO 11783, l’Agricultural Industry Electronics Foundation (AEF) a été créée en 2008. Entre-temps, l’AEF, active dans le monde entier, regroupe une cinquantaine d’entreprises et d’organisations.
Transmission physique des données
La transmission des données s’effectue via un bus CAN selon la norme 2.0b avec un taux de transmission de 250 kBaud avec une identification de 29 bits.
La transmission de courant électrique pour l’alimentation des composants électroniques est séparée de la transmission de données et définie comme suit :
- Alimentation des consommateurs de puissance avec au moins 30 A, en règle générale avec une protection de 50 A
- Alimentation des ordinateurs de processus et autres composants électroniques avec un fusible d’au moins 15 A
Cela permet de garantir que la transmission des données et de l’énergie électrique est découplée. Ainsi, la sécurité de fonctionnement du système n’est pas menacée par des problèmes au niveau des consommateurs de puissance, comme par exemple le moteur électrique surchargé d’un semoir bloqué, car en règle générale, seul le fusible de 50 A saute et pas également le fusible de 15 A de l’électronique. De même, les câbles électriques et surtout les connecteurs de la transmission de données sont peu chargés électriquement, ce qui les rend moins sensibles à la corrosion et permet de transmettre les signaux même lorsque les connexions ne sont plus optimales. L’alimentation électrique se fait généralement directement à partir de la batterie, bien visible grâce à des câbles de grande taille et des fusibles supplémentaires performants (voir illustration ci-dessous).

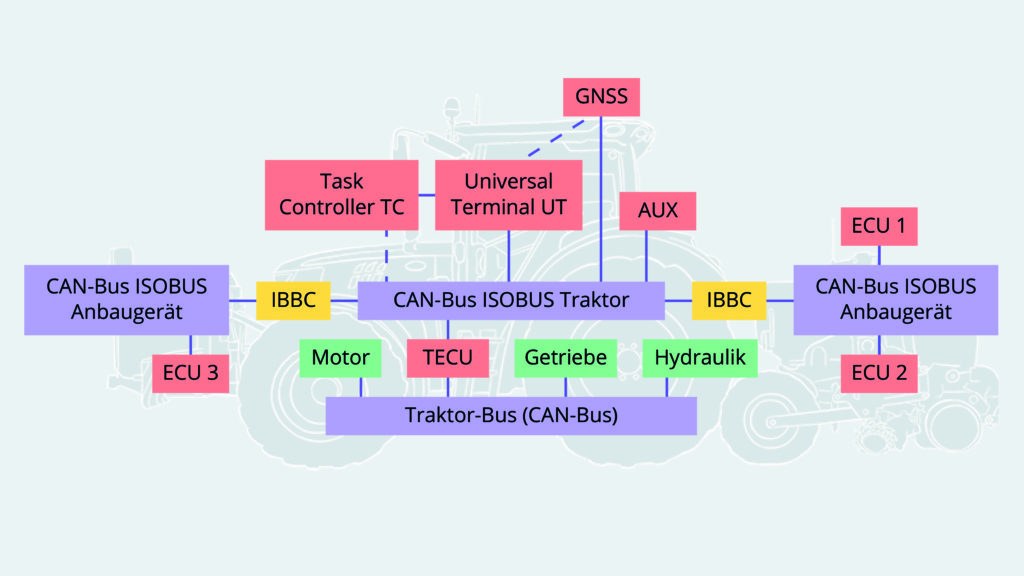
Aperçu du système
Dans la norme ISOBUS, tous les appareils et leurs fonctions ainsi que les connexions sont définis et normalisés (voir illustration). Cela permet de garantir que les composants sont désignés de manière uniforme et que les données sont traitées où.
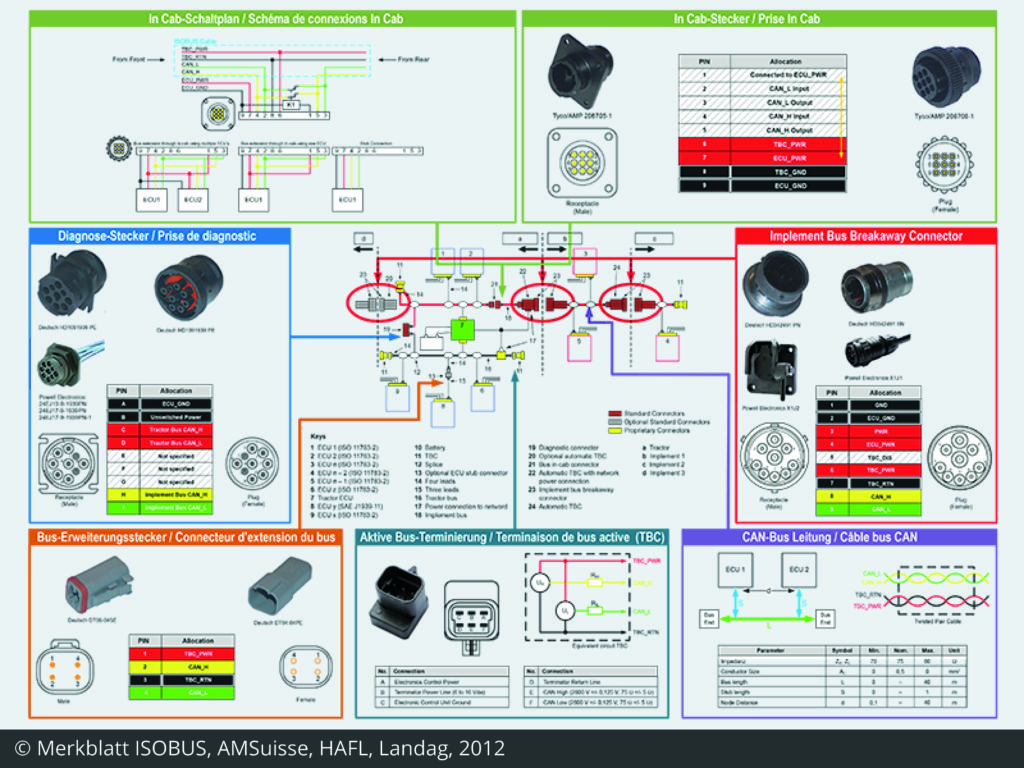
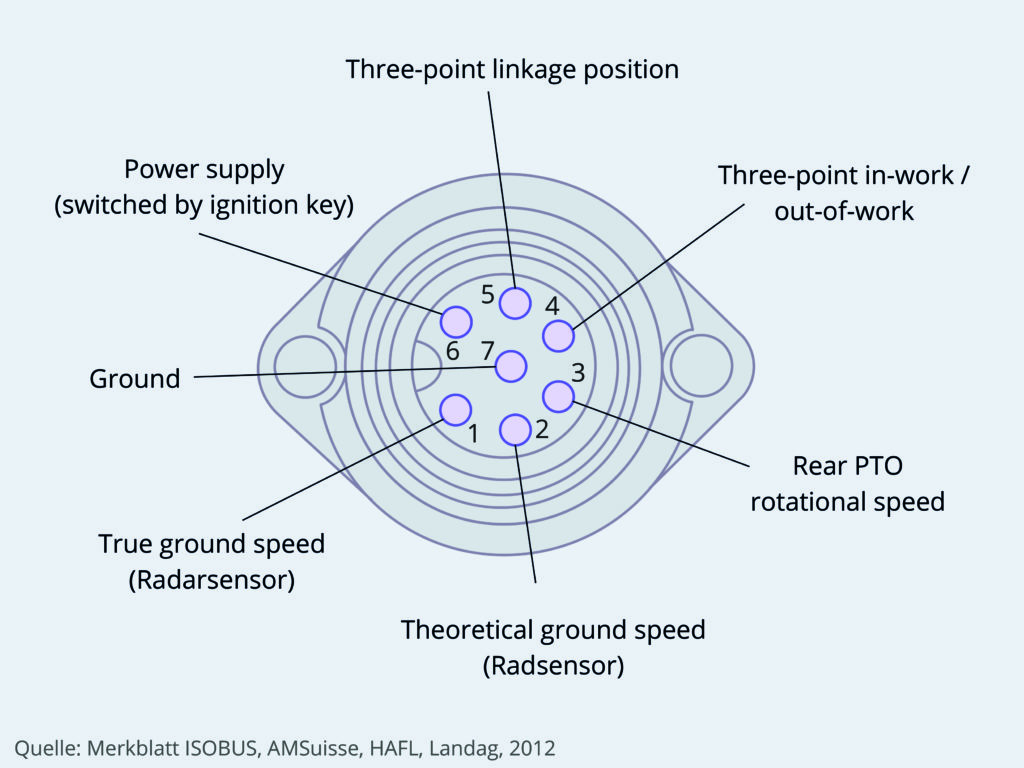
La norme ISOBUS définit également les différents connecteurs, leur brochage et leur position dans le câblage (voir illustration ci-dessous). La présence de ces fiches et prises typiques permet de reconnaître facilement un système ISOBUS. Les éléments et les câbles installés sont en vente libre dans les magasins spécialisés et peuvent être commandés, installés ou remplacés par des personnes sans connaissances particulières.
- IBBC (Implement Bus Breakaway Connector) : connexion à 9 pôles entre le tracteur et les outils portés, aussi bien à l’arrière qu’à l’avant du tracteur
- In-Cab-Connector : connecteur de câble à 9 pôles pour le raccordement de moniteurs
- Prise de diagnostic à 9 pôles (identique à SAE J1939) pour le raccordement d’ordinateurs de service
- TBC (Terminal Bus Connector) : terminaison de bus active à 6 pôles (résistance terminale)
- Connecteur d’extension de bus à 4 pôles
Les tracteurs modernes de grande taille sont souvent déjà équipés d’un système ISOBUS entièrement développé. Sur les modèles un peu plus anciens et/ou moins bien équipés, il est possible d’ajouter un système ISOBUS. Le moyen le plus simple est d’utiliser un système original du fabricant. Si cela n’est pas possible, les équipementiers proposent des kits de conversion. Il convient de noter qu’un système entièrement équipé avec toutes les interfaces n’est pas nécessaire pour toutes les applications. Pour pouvoir utiliser des fonctions simples nécessitant peu de puissance et sans navigation par satellite en affichant un simple masque sur le terminal, il suffit souvent d’une variante simplifiée et donc moins coûteuse (voir illustration). Dans de tels cas, le moniteur assume des fonctions supplémentaires telles que TECU (Tractor ECU, ordinateur de tracteur) ou TBC (Terminal Bus Connector, résistance terminale active).

Exigences relatives aux systèmes en cas de mise à niveau
| Equipement complet sur tracteur conforme à ISOBUS | Equipement minimal sans consommateur d’électricité (autochargeuse, tonne à lisier, semoir avec roue de jauge, …) | Appareil dépendant de la vitesse d’avancement (épandeur d’engrais, pulvérisateur, semoir, …) | Appareils avec commande de tronçons | |
| Courant 15 A dans la cabine | ✔ | ✔ | ✔ | ✔ |
| Courant 50 A directement à partir de la batterie | ✔ | ✘ | (✔) | (✔) |
| Calculateur de tracteur TECU intégré | ✔ | ✘ | ✘ | ✘ |
| Connexion entre le moniteur et la prise de signal | ✘ | ✘ | ✔ ³ | ✔ ³ |
| Prise pour moniteur dans la cabine | ✔ | ✔ ¹ | ✔ ¹ | ✔ ¹ |
| Prise ISOBUS à l’arrière (IBBC) | ✔ | ✔ | ✔ | ✔ |
| Récepteur GNSS | ✔ | ✘ | (✔) ⁴ ⁵ | ✔ ⁵ |
| Résistance terminale active sur tracteur | ✔ | ✘ ² | ✘ ² | ✘ ² |
| ¹ Souvent non disponible si le jeu de câbles est fourni avec le moniteur ² Résistance finale active généralement intégrée dans le moniteur ³ le moniteur joue le rôle de TECU, les signaux ISO 11786 (vitesse d’avancement, régime de prise de force, hauteur de levage, …) sont injectés dans le moniteur ⁴ Utilisé sporadiquement comme source pour la vitesse de déplacement (non recommandé) ⁵ Se connecte au moniteur |
Fonctions
Au sein de la norme ISO 11783, différentes fonctions nécessaires aux applications de l’agriculture de précision sont définies. Ces fonctions ne doivent pas être confondues avec l’utilisation des machines agricoles, qui varie considérablement d’un constructeur à l’autre et qui ne nécessite pas de normalisation. Pour faciliter la vue d’ensemble des différentes fonctions normalisées dans ISOBUS, un système de reconnaissance a été créé par l’AEF. L’élément central est un autocollant qui donne des informations sur l’étendue des fonctions dans l’appareil correspondant (voir illustration).
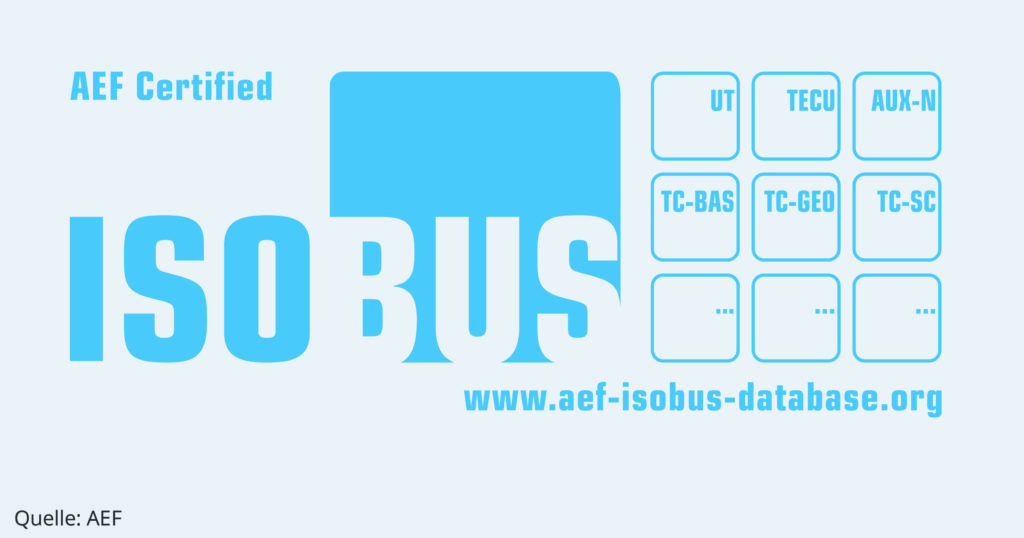
Fig. 09.06: Exemple d’autocollant pour un moniteur ISOBUS (Universal Terminal). Il dispose de la fonction d’ordinateur de tracteur (TECU), dans lequel des fonctions supplémentaires peuvent être commandées à l’aide d’un joystick (AUX-N) et les données de base de la documentation peuvent être collectées et échangées (TC-BAS, Task Controller Basic). Il est possible de travailler de manière spécifique à la surface partielle selon la carte (TC-GEO, Task Controller geo-based) et les tronçons peuvent être activés automatiquement (TC-SC, Task Controller Section Control).
Terminal universel (moniteur)
Pour commander un accessoire, un écran (Universal Terminal) est un élément central. Lorsque le système ISOBUS est lancé, des masques de commande sont transmis à l’écran (UT) par les ECU des outils portés et affichés. Les machines peuvent être commandées par des boutons programmés à l’intérieur des masques ainsi que par des touches de fonction prédéfinies à l’écran. La norme ISO 11783 garantit que la transmission est réglementée et que les éléments à afficher ont toujours la même apparence et que, par exemple, un cercle rouge est partout un cercle rouge. La machine elle-même est réglée exclusivement par l’ECU, l’écran n’a pas de fonction de réglage active – comparable à l’affichage sur le moniteur d’un PC, où aucune opération de calcul pertinente pour le programme n’est également effectuée.
TECU (Tracteurs ECU ou ordinateur pour tracteurs)
Pour que les outils portés puissent fonctionner correctement, les données relatives au tracteur, telles que le régime moteur, la vitesse d’avancement théorique et effective, la hauteur de levage, le régime de la prise de force, jusqu’aux positions des distributeurs hydrauliques auxiliaires ou aux commandes de la transmission, doivent généralement être transmises du système interne du tracteur (en général également un bus CAN) à l’ISOBUS. Dans le cas d’un semoir régulé en fonction de la vitesse, cela signifie que l’ECU du semoir peut lire la vitesse d’avancement actuelle sur la ligne de données ISOBUS et ainsi adapter le régime de l’arbre de distribution. Le TECU joue alors le rôle d’interface entre le tracteur et l’ISOBUS, en transmettant ces données du tracteur. De plus, les valeurs et les réglages actuels peuvent également être affichés sur l’UT via un masque, comme un appareil normal (voir illustration).

Si les systèmes ISOBUS sont déjà montés dans le tracteur à l’usine, les TECU font partie du système. Si les solutions de modernisation ne comportent pas de TECU, la plupart des moniteurs peuvent assurer cette fonction. Pour cela, les données du tracteur sont généralement transmises au moniteur via la prise de signal selon la norme ISO 11786 (voir illustration), reconnues par les TECU intégrés et traduites dans les formats de données CAN correspondants.
En l’absence d’une prise de signal sur le tracteur, les données de vitesse peuvent au moins être prises en charge par un récepteur GNSS externe (navigation par satellite) en cas d’urgence.
Les coordonnées actuelles du lieu peuvent également être transmises au système ISOBUS par le récepteur satellite via le TECU grâce à des interfaces.
Contrôleur de tâches et échange de données (TC-BAS)
Outre la communication pour la régulation des machines, la norme ISOBUS comprend également la collecte et la transmission des données de commande du contrôleur de tâches vers un PC ou un ordinateur externe. le système de gestion de l’exploitation(voir l’article « Systèmes de gestion et d’information agricoles (FMIS) dans la production végétale« ). Un élément important à cet égard est la structure des commandes, qui est toujours la même partout. Elle comprend
- Mission
- Culture
- Système de culture
- Client
- Exploitation
- Accessoire
- Technique d’intervention
- Champ (ou partie de champ)
- Produit/substance auxiliaire
- Groupe de produits
- Travailleur
- Unité (kg, l, t)
- Commentaires (par ex. chardons, chiendent, …)
- Groupes de commentaires (regroupement de différents commentaires en un seul groupe, par exemple les mauvaises herbes)
- Référence du fichier
Si les missions ou les travaux sur le terrain sont effectués avec un système ISOBUS, la plupart de ces éléments (à l’exception des commentaires et des groupes de commentaires) devraient avoir été saisis soit directement via le moniteur, soit via le FMIS. Ces données de base sont conservées dans le système et peuvent être rappelées lors du traitement d’autres commandes. La saisie de ces données de base prend toutefois relativement beaucoup de temps. Les travaux dans les champs peuvent également être effectués sans la structure ISOBUS. Dans ce cas, les possibilités en matière de documentation et de planification ne peuvent toutefois pas être exploitées.
Il est recommandé de saisir ces informations sur un PC externe dans le FMIS avant l’exécution, puis de les transférer sur le contrôleur de tâches juste avant le travail proprement dit. Une fois le travail terminé, les protocoles peuvent être retranscrits dans le FMIS. Ce transfert de données se fait principalement par clé USB. Des systèmes de transmission sans fil via le réseau de téléphonie mobile sont disponibles (voir l’article « Gestion spécifique des sous-surfaces« ).
Gestion spécifique des sous-surfaces (TC-GEO)
Si le contrôleur de tâches dispose d’une navigation par satellite et que l’accessoire a la capacité de reprendre différents débits de consigne du contrôleur de tâches, il est possible d’appliquer un certain débit d’adjuvants à une position donnée. Les cartes d’épandage avec valeurs de consigne nécessaires à cet effet doivent être préparées au préalable, converties dans le FMIS en un fichier compatible ISOBUS et transférées au contrôleur de tâches. Celui-ci ne se trouve pas physiquement dans l’accessoire, mais dans ou à proximité du boîtier du moniteur. Dans certains cas, il est également possible de transférer la carte dans un autre format via une interface spécifique au fabricant (par exemple, le format Shapefile dans les moniteurs de John Deere) (voir l’article « Gestion spécifique des sous-surfaces« ).
Contrôle de section (TC-SC)
Si des tronçons peuvent être activés et désactivés sur l’outil porté et si le Task Controller dispose de la possibilité de distinguer les parties du champ déjà traitées de celles qui ne le sont pas, les tronçons peuvent être activés automatiquement en fonction de l’emplacement et du degré de chevauchement. Pour cela, il faut attribuer aux champs leurs limites respectives. Les limites du champ sont généralement relevées lors du premier tour du champ ou séparément avec le même appareil. Alternativement, ils peuvent être saisis dans le SIGM sur la base d’images satellites (généralement GoogleEarth). Cette méthode est toutefois sujette à erreur, car des écarts de quelques mètres ne sont pas rares sur les images satellites et des lacunes sont donc possibles (voir l’article « Gestion spécifique des surfaces partielles« ).
Compatibilité entre différents appareils et machines
Même si toutes les règles de la norme ISO 11783 sont respectées, il peut arriver que les masques ne s’affichent pas de manière optimale sur certains écrans, voire pas du tout. Seul un essai direct avec les ordinateurs et les versions de programme concrets permet d’y voir plus clair. L’AEF organise régulièrement des rencontres entre professionnels qui permettent aux fabricants des différents composants de tester la compatibilité de leurs développements dans un cadre de laboratoire et de résoudre d’éventuels problèmes. Ainsi, il est désormais rare que la représentation des masques sur les appareils et les machines soit inutilisable et que l’utilisation des appareils soit impossible. Toutefois, là encore, seul un test sur ses propres machines permet d’être certain de la compatibilité.
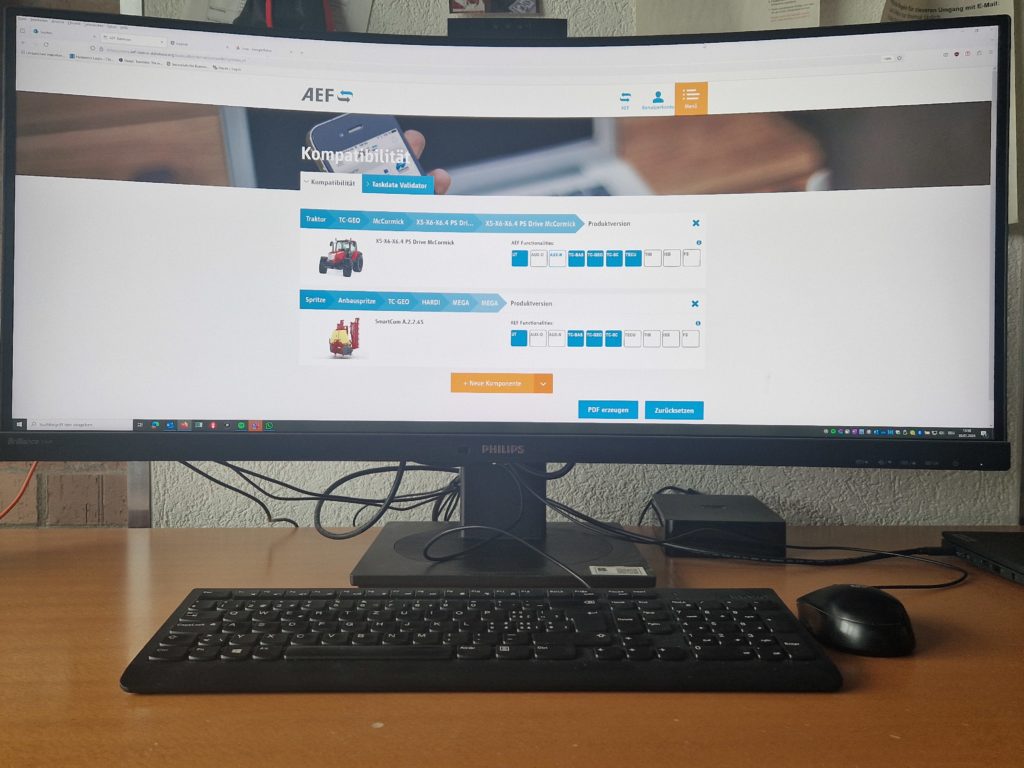
Mais il en va autrement pour les fonctions beaucoup plus complexes de la gestion spécifique des surfaces partielles et des coupures de tronçons. L’AEF teste également la compatibilité et la publie dans une base de données en libre accès créée à cet effet(www.aef-isobus-database.org). Sur cette plateforme, il est possible de contrôler l’étendue des fonctions des différents appareils et, en cas de sélection de plusieurs appareils, leurs possibilités de combinaison (voir illustration).
Instructions d’action
La sécurité de fonctionnement, telle qu’elle a été obtenue avec les interfaces USB, n’existe pas encore pour ISOBUS. Les points suivants peuvent toutefois aider à éviter les pannes et les erreurs :
- Lire les modes d’emploi et s’entraîner aux opérations hors saison
- Effectuer (faire effectuer) régulièrement les mises à jour du logiciel
- Sauvegarder régulièrement les données
- nettoyer régulièrement les connecteurs (air comprimé) et les conserver (électrospray)
- Avant l’achat, vérifier la compatibilité des combinaisons de machines à l’aide de la base de données AEF et, le cas échéant, demander une confirmation écrite au revendeur.
Perspectives de développement
ISOBUS a contribué de manière décisive à la mise en place d’outils électroniques modernes sur les machines agricoles.
La norme est continuellement développée, par exemple avec le TIM (Traktor Implement Management, contrôle du tracteur par l’outil porté), l’enregistrement continu des données des outils (LOG) ou la définition d’une fonction de désactivation de certains outils (ISB, ISOBUS Shortcut Button).
Aperçu des fabricants
La plupart des fabricants de tracteurs et d’outils agricoles proposent des applications ISOBUS. Ils informent également sur la manière dont les tracteurs et les outils peuvent être mis à niveau directement par le fabricant ou par des fournisseurs tiers.
Références
- AMSuisse, 2012. Fiche technique ISOBUS. Documentation cours ‘ISOBUS et GPS’, AMSuisse, HAFL, Landag.
- Organisation internationale de normalisation : ISO 11783 Tracteurs et machines pour l’agriculture et la sylviculture – Contrôle de série et réseau de données de communication, parties 1-14, Genève, Suisse.
- Batbayar E.E.T., Tsogt-Ochir S., Oyumaa M., Ham W.C., Chong K.T., 2019. Développement de systèmes agricoles conformes à la norme ISO 11783 : rapport d’expérience. In : Dajsuren Y., van den Brand M. (eds) Automotive Systems and Software Engineering. Springer, Cham. https://doi.org/10.1007/978-3-030-12157-0_9
Glossaire
Le bus CAN : CAN signifie Controller Area Network (réseau de contrôleurs). Le bus CAN est utilisé depuis le milieu des années 1980 dans les applications automobiles, c’est-à-dire par exemple dans les voitures et les machines agricoles, pour l’échange de données. Le bus CAN se contente de deux câbles, il est à l’abri des perturbations et facile à poser.
Remarque
Les textes et les images proviennent du média spécialisé « Technologies numériques dans l’agriculture », publié par edition-lmz SA 2021.
Auteur : Bernhard Streit