Thèmes
Gestion intra-parcellaire spécifique
Dans le cas d'une gestion spécifique à une partie de la parcelle, certaines zones d'une parcelle sont gérées individuellement en fonction des conditions spécifiques du site. Les différences de localisation peuvent être déterminées à l'aide de capteurs. Cela permet d'utiliser plus efficacement les intrants tels que le diesel (travail du sol), les engrais, les produits phytosanitaires et les semences, car chaque zone de parcelle est gérée en fonction de la nature de son sol, de ses réserves en nutriments et de son potentiel de rendement.

Aperçu
- Dans le cas d’une gestion spécifique à une partie de la parcelle, certaines zones d’une parcelle sont gérées individuellement en fonction des conditions spécifiques du site. Les différences de localisation peuvent être déterminées à l’aide de capteurs.
- La gestion spécifique à la surface partielle peut être appliquée aux mesures de terrain telles que le travail du sol, le semis, la fertilisation ou la protection phytosanitaire.
- L’exploitation spécifique à la surface partielle permet d’utiliser plus efficacement les intrants tels que le diesel (travail du sol), les engrais, les produits phytosanitaires et les semences, car chaque zone de parcelle est exploitée en fonction de la nature de son sol, de ses réserves en nutriments et de son potentiel de rendement. Des essais réalisés par l’EPF de Zurich et Agroscope sur la Swiss Future Farm montrent que la fertilisation spécifique à la surface partielle du blé d’hiver permet d’économiser en moyenne 10 pour cent d’azote. Cela correspond à une économie d’engrais pure d’environ 30 CHF/ha.
- Une exploitation spécifique à la surface partielle suppose l’utilisation de systèmes de conduite parallèle, y compris les tracteurs et les outils portés (avec interface ISOBUS) (voir les articles « Systèmes de conduite parallèle » et « Transmission numérique normalisée ISOBUS des données dans les machines agricoles »). En plus des systèmes de conduite parallèle, il y a des coûts pour la mesure de l’état des plantes (approvisionnement en azote, biomasse) (environ 30 000 CHF pour un capteur lié au tracteur ou 190 CHF par an pour des images satellites) ainsi que pour la commande du débit de l’épandeur d’engrais, du semoir ou du pulvérisateur via ISOBUS. En plus des investissements techniques, il y a des dépenses de temps et d’argent pour l’établissement du zonage des champs, comme par exemple les cartes de rendement à long terme, l’échantillonnage du sol spécifique à la surface partielle et l’acquisition du logiciel de planification correspondant.
- L’exploitation spécifique à la surface partielle, telle qu’elle peut être pratiquée dans les grandes régions de culture structurées, est peu répandue en Suisse en raison de la petite taille des parcelles et des coûts d’acquisition élevés pour les technologies.
- En Suisse, les méthodes d’exploitation spécifiques aux surfaces partielles doivent être adaptées aux conditions de culture à petite échelle. Une mise en œuvre en collaboration avec des prestataires de services tels que des entrepreneurs agricoles permet de réduire les coûts d’investissement individuels.

Domaines d’application et avantages
-Pour la fertilisation spécifique à la surface partielle, on distingue la fertilisation de base pour le potassium, le phosphore et le magnésium ainsi que les fertilisations azotées qui suivent. Des études récentes de l’EPF et d’Agroscope montrent que la fertilisation azotée spécifique à la surface partielle permet d’économiser 10 pour cent d’azote dans le blé d’hiver.
-L’ensemencement spécifique à une partie de la parcelle peut être planifié en fonction des différents types de sol (donne des informations sur l’humidité présente) ou de la topographie au sein d’une parcelle et promet un approvisionnement des plantes adapté au site.
-Dans le domaine de la protection des plantes, les régulateurs de croissance sont appliqués de manière spécifique à la surface partielle en se basant sur la biomasse ; les herbicides sont appliqués de manière variable en se basant sur des capteurs grâce à la commutation de secteurs ou de buses individuelles (voir l’article « Commande de la quantité d’application basée sur des satellites et des capteurs » (Section Control)).
Aperçu de la technologie
Utilisation de la gestion spécifique à la surface partielle
Par convention, on s’oriente vers les conditions moyennes du site pour l’exploitation des champs. Il en résulte que les cultures ou les récoltes peuvent présenter des rendements ou des qualités différentes sur des surfaces hétérogènes. Dans le cas de l’exploitation spécifique à la surface partielle, les parcelles sont divisées en surfaces partielles sur la base des conditions naturelles du site, qui sont ensuite exploitées individuellement et adaptées aux exigences spécifiques de la zone. L’objectif est d’améliorer la gestion économique et écologique. Cette répartition est surtout utile sur les parcelles plus grandes et hétérogènes. Aux débuts de l’agriculture de précision, au début des années 1990, les cartes de rendement des moissonneuses-batteuses constituaient la base de l’identification des différences de rendement et donc de l’hétérogénéité au sein de la parcelle. Toutefois, ces cartes ne montrent que les différences sur une année et n’indiquent pas pourquoi ces différences sont apparues. Pour cela, il faut se référer à des cartes de rendement pluriannuelles et effectuer d’autres mesures pour déterminer la teneur en nutriments du sol, le type de sol et la topographie.
Conditions techniques
Les composants mécatroniques et les normes de communication fournissent les bases techniques pour la mise en œuvre de la gestion spécifique des surfaces partielles. L’interface ISOBUS normalisée (voir article « Transmission numérique normalisée ISOBUS des données dans les machines agricoles ». ) régit la communication entre le tracteur et l’outil porté lors de la commande et de l’utilisation de l’outil. Avec la fonction ISOBUS TG-GEO activée, les valeurs liées à la position peuvent être transmises en temps réel à l’outil porté et prises en charge par celui-ci pour la régulation de l’application. La condition préalable à l’utilisation de cette fonctionnalité est un récepteur GNSS. Une carte d’application géoréférencée avec des valeurs de consigne (engrais kg/ha, lisier m³/ha, semences kg/ha) peut être lue sur le terminal de commande du tracteur ou également sur un terminal universel externe (UT). L’UT affiche à la fois la carte d’application et le masque de commande de l’équipement. Dans la mesure où le terminal est connecté à un serveur, la carte peut être envoyée au terminal via le réseau mobile à partir du système de gestion et d’information de la ferme (FMIS) et être relue après l’application (voir les illustrations ci-dessous). En outre, la plupart des terminaux proposent une importation via une interface USB ou Bluetooth.



Création de sous-surfaces (zones de gestion)
La cartographie de rendement par position avec la moissonneuse-batteuse ou l’ensileuse permet de déterminer les différences de rendement sur une parcelle. Cela permet de refléter l’hétérogénéité au cours d’une année donnée. Toutefois, cela ne permet pas de se prononcer sur les causes sous-jacentes de l’hétérogénéité. Ceux-ci peuvent être liés au sol ou à la gestion (par exemple, problèmes de drainage). Pour réussir à diviser une parcelle en sous-parcelles, il est pertinent de tenir compte d’une période de rendement plus longue et de rechercher les causes des différences. L’animation suivante montre les possibilités de déterminer les différences de localisation d’une parcelle à l’aide de photos aériennes, de cartes pédologiques, d’échantillons de sol et des connaissances des exploitants.
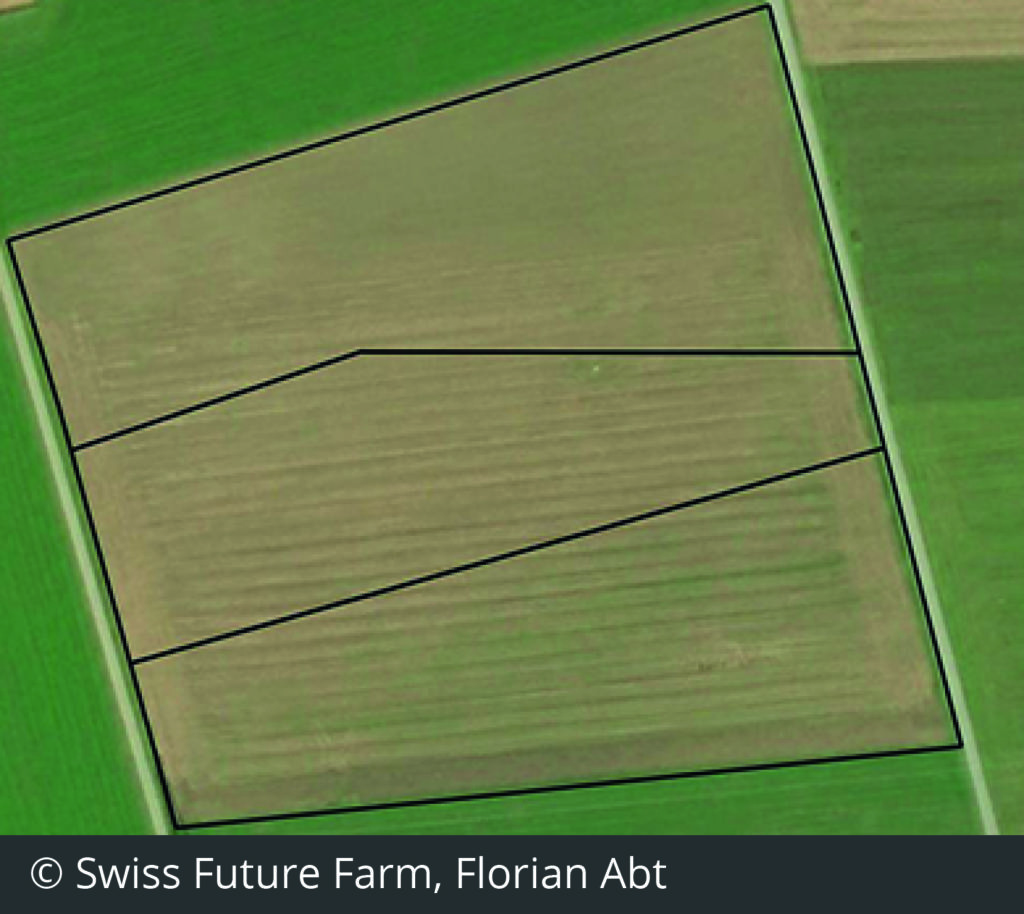
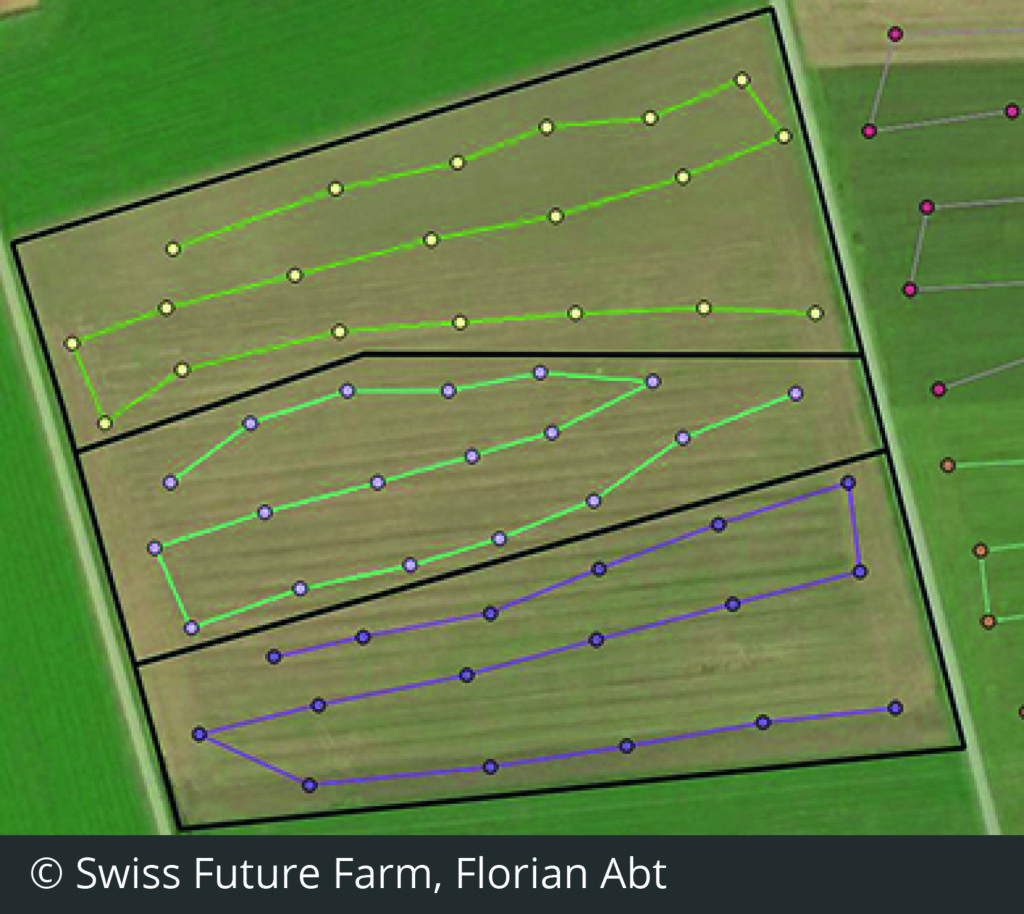
Rares sont les exploitations qui souhaitent se lancer dans l’exploitation spécifique à la surface partielle et qui peuvent déjà se baser sur des cartes de rendement de moissonneuses-batteuses établies depuis de nombreuses années. Comme l’élaboration de ces cartes est en outre coûteuse et sujette à erreurs, il est préférable de représenter les différences sur une surface à l’aide de cartes de biomasse basées sur des satellites et disponibles depuis de nombreuses années. Il existe différents prestataires de services qui proposent de telles cartes de biomasse(voir paragraphe « Fournisseurs de capteurs et d’équipements« ). Ces données descriptives peuvent être combinées avec des informations explicatives issues de cartes des types de sol ou de l’expérience de l’exploitant. En intégrant les différentes sources de données disponibles, il est possible de diviser le champ en sous-surfaces (zones de gestion). La figure 06.04 montre la surface du Rüedimoos divisée en trois zones de gestion sur la base des informations disponibles. Dans les zones de gestion, il est ensuite possible de prélever séparément des échantillons de sol PER géoréférencés pour l’humus, le pH et les éléments nutritifs Mg, K et P (voir figure 06.05).
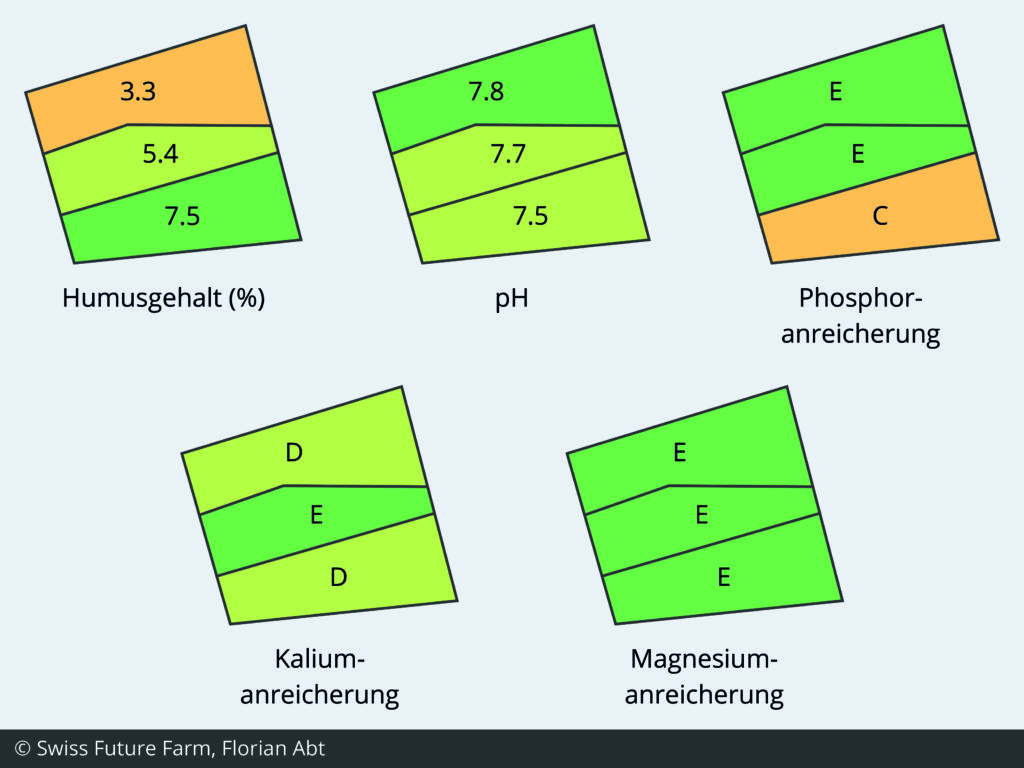
La figure 06.06 montre les différentes teneurs en nutriments et en humus ainsi que les valeurs de pH des zones de gestion sur la surface Rüedimoos. Sur la base des mesures de la teneur en nutriments, il est possible d’adapter de manière variable la fertilisation de base dans les sous-surfaces et de compenser une surface faiblement approvisionnée par un apport plus important de nutriments. Dans le présent exemple, ce n’est nulle part le cas. La teneur en humus permet d’adapter la densité de semis à la surface partielle lors du semis.
Applications technologiques
La procédure en ligne et la procédure hors ligne
En ce qui concerne les méthodes de gestion spécifiques aux sous-surfaces, on peut distinguer les méthodes en ligne et les méthodes hors ligne. Dans le cas du procédé en ligne, un capteur mesure les paramètres du sol (humidité, température, matière organique) ou des plantes (chlorophylle) pendant l’opération (par exemple lors du travail du sol ou de la fertilisation) et communique les valeurs à l’outil porté via l’ordinateur de bord. Celui-ci adapte alors en temps réel le débit. Dans le cas de la procédure hors ligne, les paramètres sont enregistrés avant la mesure sur le terrain proprement dite et sont ensuite lus sur le terminal du tracteur sous forme de carte d’application (voir figure 06.02). Par exemple, un drone permet de calculer l’indice de biomasse du colza en automne et de l’utiliser au printemps pour la fertilisation. La procédure hors ligne présente l’avantage que les valeurs mesurées peuvent être vérifiées et adaptées une nouvelle fois par l’exploitant. L’inconvénient est le passage supplémentaire sur le terrain ou un survol supplémentaire avec un drone. Dans la pratique, la combinaison des méthodes en ligne et hors ligne (approche map-overlay) donne les meilleurs résultats en matière de fertilisation. Pour ce faire, une carte de rendement potentiel est enregistrée sur l’ordinateur de bord et comparée aux données mesurées en temps réel par le capteur.
Exemples de procédures en ligne et hors ligne
| Mesure de terrain | Procédure | |
| en ligne | hors ligne | |
| Ensemencement | Plantation de précision Le semoir monograine Precision Planting mesure la résistance à la pénétration dans le sol à l’aide d’un capteur et adapte automatiquement la pression de terrage aux conditions de sol existantes. L’objectif est d’obtenir une profondeur de semis uniforme avec un tassement minimal du sillon. Le semoir peut en outre faire varier la profondeur de semis en fonction de l’humidité du sol mesurée en temps réel.  Fig. 06.07 : Le semoir de Precision Planting lors du semis de maïs | Modèles d’altitude Pour l’ensemencement spécifique à la surface partielle, il est possible d’utiliser des modèles numériques d’altitude afin de représenter les éventuelles différences d’humidité entre les crêtes et les dépressions. Ces modèles peuvent être formés à partir des données du récepteur GNSS du tracteur. Elles peuvent ensuite être calculées avec les éventuelles cartes de potentiel de rendement disponibles et les mesures de teneur en humus issues de l’échantillonnage du sol spécifique à la surface partielle pour obtenir une carte d’application pour le semis. 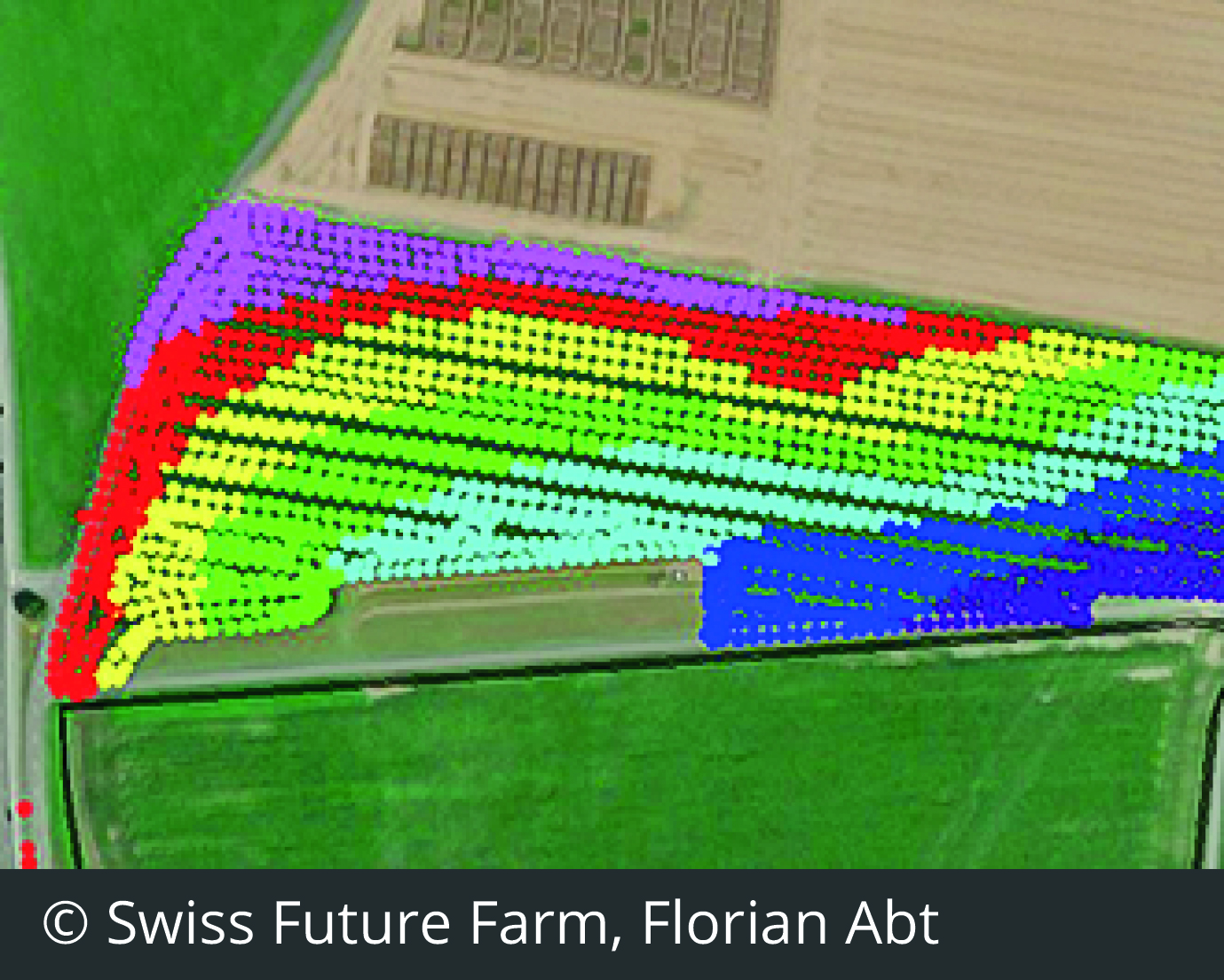 Fig. 06.08 : Un modèle d’altitude peut être créé à partir des données GNSS du tracteur à l’aide d’un FMIS. |
| Fertilisation | Capteur Fritzmeier Isaria : Le capteur Fritzmeier Isaria est utilisé en culture frontale et mesure l’indice de végétation avec un éclairage actif. Le capteur commande directement l’épandeur d’engrais et fonctionne via un terminal séparé, sur lequel il est également possible d’enregistrer une carte pour le procédé de superposition de cartes. | Échantillonnage du sol spécifique à la surface partielle : Les résultats de l’échantillonnage du sol spécifique à la surface partielle (voir figure 06.06) peuvent être utilisés lors de la fertilisation de base, afin de fertiliser les surfaces partielles échantillonnées en fonction de l’approvisionnement existant en éléments nutritifs. Drone avec caméra multispectrale : Les drones équipés d’un capteur multispectral peuvent être utilisés pour calculer un indice de végétation. Les drones se caractérisent par une haute résolution spatiale par rapport aux données satellites. |
 Fig. 06.09 : Le capteur Isaria de Fritzmeier en action | 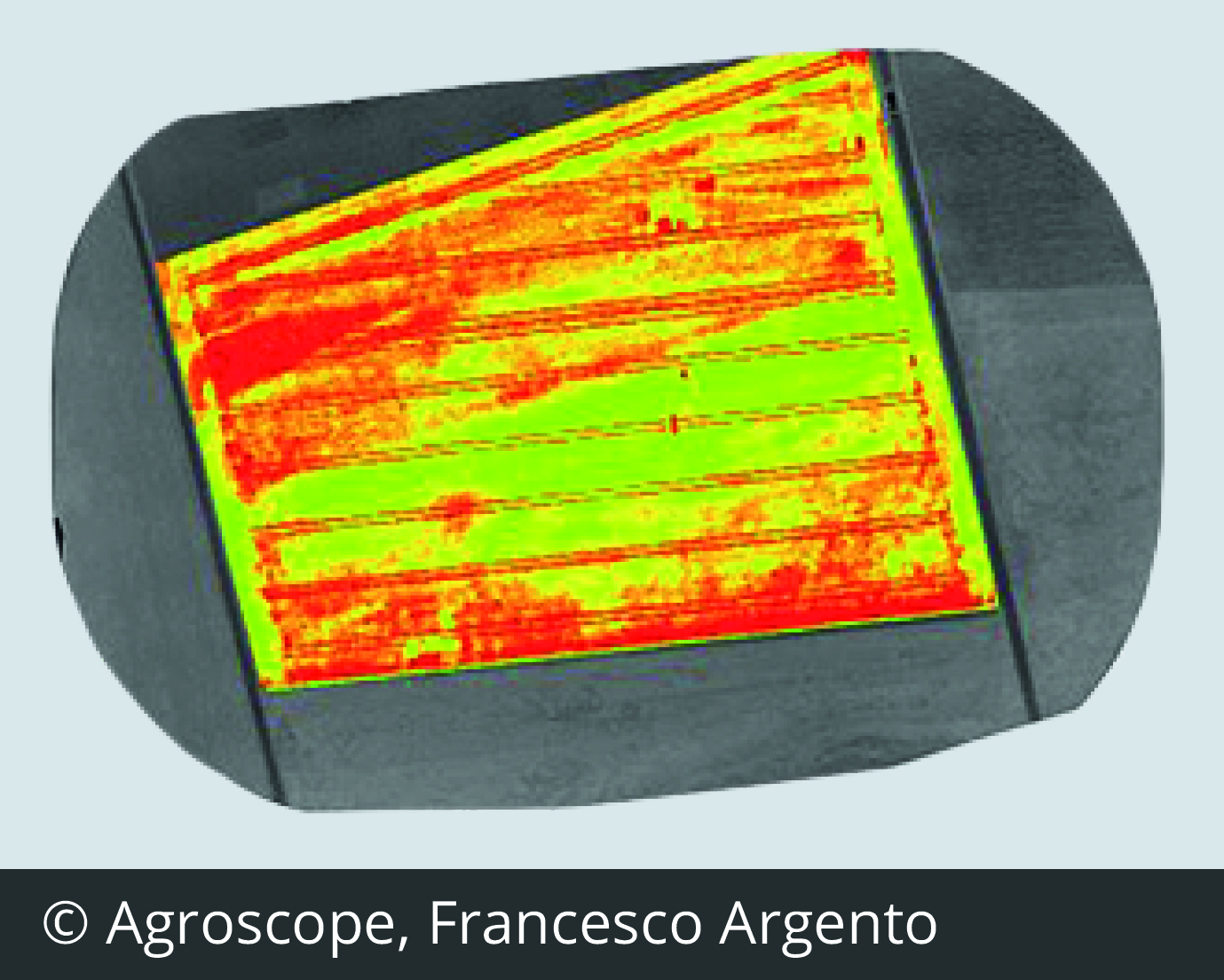 Fig. 06.10 : Indice de biomasse (NDVI) | |
| Farmfacts Greenseeker : Le Greenseeker de la société Farmfacts est utilisé dans la culture frontale et calcule l’indice de végétation normalisé différentiel (NDVI) du peuplement végétal. Le capteur peut également être utilisé pour la méthode de superposition de cartes. | Images satellites Sentinel 2 : Dans le cadre du programme Copernicus, l’Agence spatiale européenne (ESA) met gratuitement à disposition les données des satellites d’observation de la Terre Sentinel. Les données peuvent être utilisées pour calculer des indices de végétation. Un grand nombre de prestataires de services établissent à partir de ces données des cartes d’application pour la fertilisation azotée ou des cartes de potentiel de rendement. Ces cartes d’application peuvent être lues sur le terminal du tracteur. | |
 |  | |
| Fig. 06.11 : Farmfacts Greenseeker en action | Fig. 06.12 : Carte d’application établie sur la base des données Sentinel-2 sur la plateforme web AtFarm(http://at.farm). | |
| Protection des plantes | Application de régulateurs de croissance : Les capteurs Greenseeker et Isaria mentionnés pour la fertilisation peuvent également être utilisés pour déterminer l’évolution de la population lors de l’application de raccourcisseurs de tige dans les céréales. Application d’herbicides totaux en fonction de la végétation : Des fournisseurs comme Amazone (Amaspot) ou Trimble (Weedseeker) proposent des kits d’adaptation de caméras pour les pulvérisateurs existants afin de détecter de manière ciblée les mauvaises herbes lors de l’application d’herbicides totaux. La caméra détecte les mauvaises herbes en temps réel et permet la commande individuelle des buses sur le pulvérisateur. | Application de régulateurs de croissance : L’évolution du peuplement déterminée à partir des images satellites et des drones peut être utilisée pour le dosage de la dose d’application des raccourcisseurs de tige. Une carte d’application correspondante est traitée par le terminal de l’appareil phytosanitaire. |
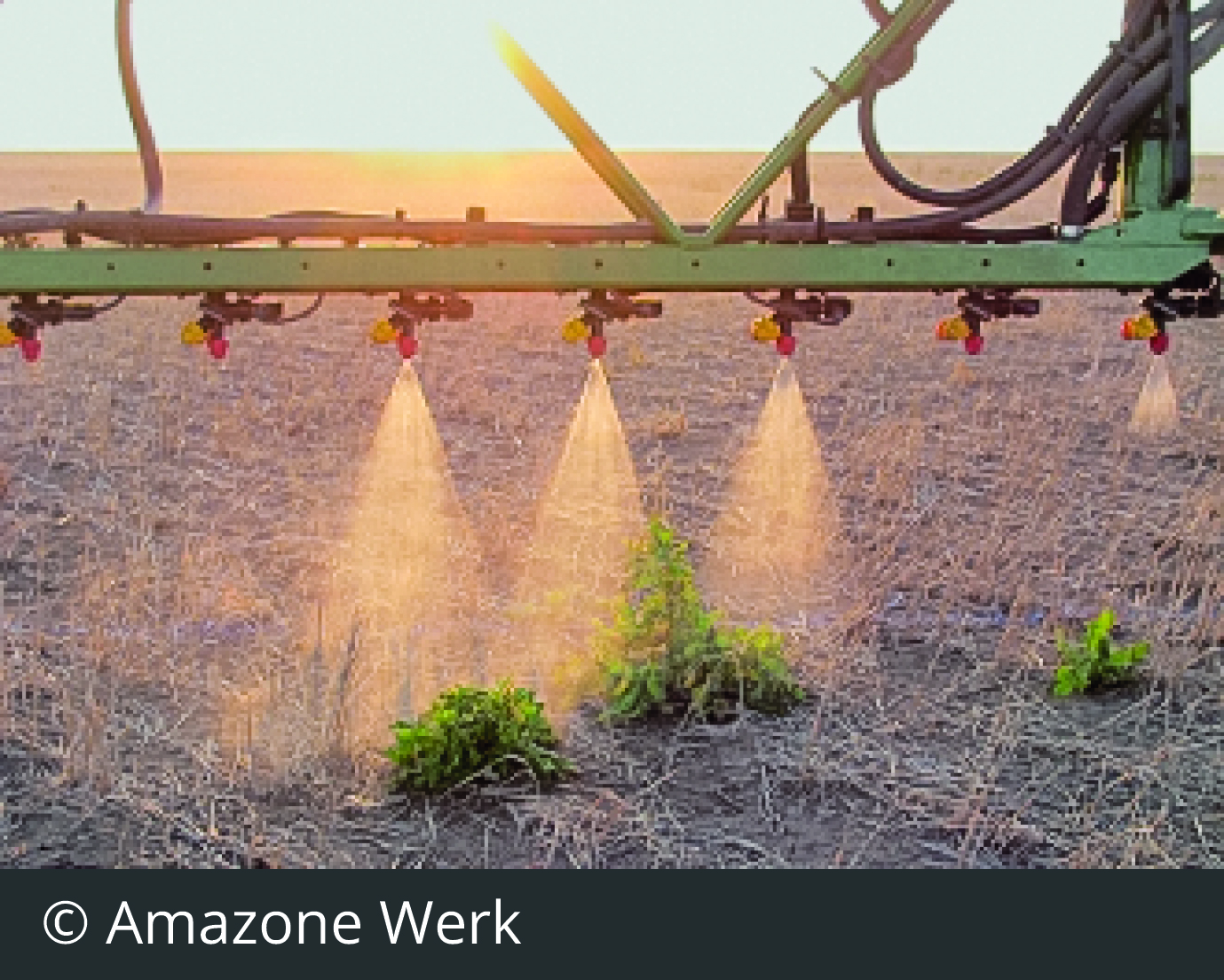 Fig. 06.13 : Application ciblée d’herbicide avec Amazone Amaspot | ||
Le défi de l’évacuation des engrais
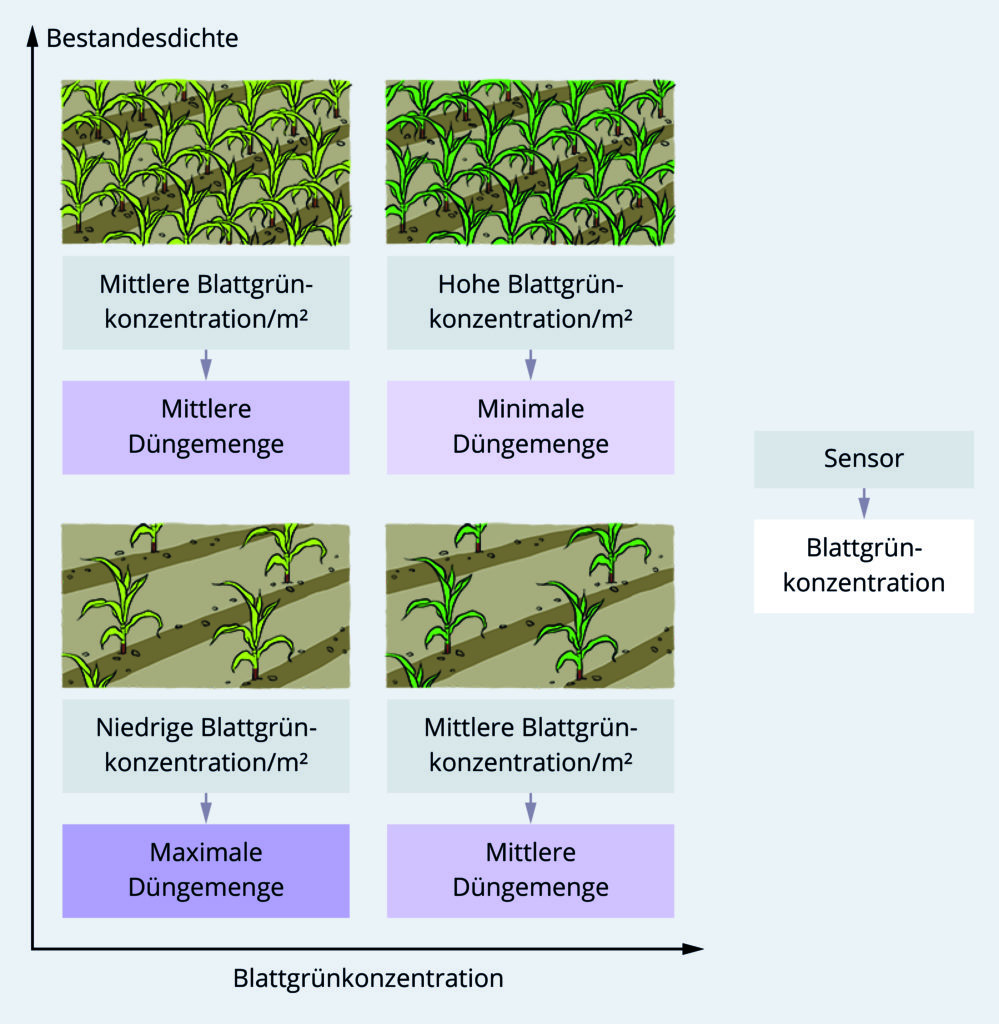
L’utilisation de la méthode en ligne pour la fertilisation azotée est un défi pour la production végétale. Les capteurs de détection de l’état des plantes enregistrent la concentration de feuilles vertes sur une surface donnée. La concentration de feuilles vertes est une valeur mixte de densité de peuplement/biomasse et d’approvisionnement en azote (figure 06.14). Si la quantité d’engrais est calculée sur la base de la concentration de feuilles vertes par unité de surface (figure 06.15), les valeurs obtenues sont différentes de celles obtenues en calculant la quantité d’engrais sur la base de la concentration de feuilles vertes par unité de surface et de la densité de peuplement (figure 06.16). La question se pose de savoir quel est le bon taux d’application dans chaque situation. Les algorithmes de régulation mis à disposition par les fournisseurs de capteurs pour les différentes cultures peuvent – mais ne doivent pas – classer la situation sur place de manière adéquate.
Aussi bonne que soit l’évaluation de l’état des plantes par les capteurs, des paramètres tels que les caractéristiques du sol (type de sol, compactage), la disponibilité actuelle et future des nutriments et de l’eau, la température et les maladies ne sont pas pris en compte. Des informations supplémentaires telles que les cartes des sols ou des nutriments et le regard de l’utilisateur sur le terrain sont ici d’une grande aide.


Aspects économiques du travail
Le début de l’exploitation spécifique à une partie de la surface doit être bien réfléchi et planifié. Il est essentiel de définir les objectifs que l’on souhaite poursuivre avec la gestion spécifique à la surface partielle, afin de choisir les outils en conséquence. Les coupes ne devraient pas être inférieures à un hectare, en particulier si l’on travaille avec des données satellites (résolution spatiale de 10 m).
Certaines mesures, comme l’utilisation d’un semoir avec régulation automatique de la pression d’enterrage des socs, sont plus faciles à mettre en œuvre, d’autres mesures nécessitent un travail préparatoire plus important. Pour une fertilisation spécifique à une partie de la surface, il faut s’attendre à des dépenses importantes dans le domaine de la création de zones de gestion et dans l’échantillonnage du sol. Pour la préparation des données de base, il est intéressant de se procurer auprès d’un prestataire de services une carte pluriannuelle de la biomasse ou une carte du potentiel de rendement basée sur des images satellites. Les cartes de biomasse à long terme peuvent être utilisées aussi bien pour le semis spécifique à une partie de la surface que pour la superposition de cartes lors de la fertilisation azotée.
Les cartes de rendement des moissonneuses-batteuses sont difficiles à établir et sujettes à des erreurs. L’échantillonnage du sol spécifique à la surface partielle et géoréférencé offre l’avantage de rendre visibles les différences d’approvisionnement en nutriments dans la surface partielle et de suivre les changements dans le temps. Néanmoins, il est difficile de réaliser une fertilisation de base spécifique à une partie de la surface avec des engrais de ferme.
D’importantes connaissances en matière de travail et d’économie d’entreprise de l’exploitation spécifique aux surfaces partielles ont pu être acquises dans le cadre du projet On-Farm-Research de la chambre d’agriculture du Schleswig-Holstein sur le domaine de Helmstorf. Pendant la durée du projet, de 2007 à 2017, différentes méthodes de gestion spécifique des surfaces partielles ont été testées dans des conditions pratiques. Dans le domaine de la fertilisation azotée, il s’est avéré qu’une application conséquente de la méthode en ligne avec capteur, combinée à la superposition de cartes, exigeait beaucoup de l’utilisateur. Cette estimation peut également être partagée après des interventions pratiques à la Swiss Future Farm de Tänikon, où des essais ont été réalisés avec la variante hors ligne avec des cartes d’application préfabriquées entre 2018 et 2020.
Lors de la fertilisation, il faut toujours veiller à ce que les cartes de distribution soient correctement enregistrées. Sinon, il n’est pas clair de savoir ce qui a réellement été appliqué sur la surface. Il est également possible de représenter de cette manière les retards lors de l’augmentation ou de la diminution de la quantité d’engrais entre deux zones (voir figure 06.02).
Aspects de gestion d’entreprise
Les coûts de la gestion spécifique à la surface partielle varient en fonction du domaine d’application. La condition préalable à un démarrage judicieux est un tracteur équipé d’un système de guidage GNSS et disposant d’une interface ISOBUS.
Les coûts d’acquisition pour les différents domaines d’application peuvent être chiffrés comme suit.
Ensemencement
- Le semoir a besoin de la fonction TC GEO pour traiter les cartes d’application ainsi que pour appliquer les doses de manière variable et en fonction du lieu.
Fertilisation
- L’épandeur d’engrais a besoin de la fonction TC GEO pour traiter les cartes d’application et distribuer les quantités d’engrais de manière variable et en fonction du lieu.
- Le prix des capteurs pour la détermination en ligne des indices de végétation est d’environ CHF 30’000.
- Le prix d’un drone équipé d’un capteur multispectral pour la détermination des indices de végétation et avec correction RTK est d’environ 10’500 CHF.
- Les cartes de rendement potentiel basées sur les satellites pour la méthode de superposition de cartes coûtent environ 7 CHF/ha, mais peuvent être utilisées pour différentes mesures sur le terrain et pendant plusieurs années.
- Pour les indices de végétation actuels basés sur les satellites, les prix varient fortement. Sur certaines plateformes, il est possible de créer gratuitement des fiches d’application. D’autres fournisseurs travaillent avec des abonnements annuels qui coûtent forfaitairement jusqu’à 190 CHF/an.
- Pour l’échantillonnage du sol spécifique à la surface partielle, il faut s’attendre à des coûts supplémentaires par rapport à l’échantillonnage PER, car il faut faire appel à un prestataire de services externe disposant de la technique d’échantillonnage correspondante et il faut effectuer davantage de piqûres par rapport à l’échantillonnage conventionnel.
Protection des plantes
- Pour l’équipement ultérieur d’un pulvérisateur avec détection des adventices par caméra et commande individuelle des buses, il faut compter avec des coûts d’environ 5000 CHF/m. Pour un pulvérisateur d’une largeur de travail de 15 mètres, cela représenterait CHF 75’000.
Il s’avère que des coûts d’investissement élevés sont nécessaires pour se lancer dans la gestion spécifique des surfaces partielles. Il peut être intéressant de se lancer pour les exploitations qui disposent déjà de semoirs, de pulvérisateurs ou d’épandeurs d’engrais TC GEO fonctionnels. Cependant, les résultats du projet On-Farm-Research de Gut Helmstorf, qui a bénéficié d’un suivi scientifique, montrent que le système de fertilisation en ligne utilisé dans ce cadre, combiné à la méthode Map-Overlay, ne permettait pas de générer des rendements supplémentaires économiques grâce à la fertilisation adaptée, compte tenu de tous les coûts d’acquisition et de travail. L’utilisation de données satellites offre toutefois un potentiel, car elles sont disponibles à moindre coût. Par ailleurs, des essais réalisés par Agroscope et l’EPF de Zurich ont montré que la fertilisation optimisée en fonction de la surface partielle permettait d’économiser environ 10 pour cent d’azote tout en conservant les mêmes rendements avec la fertilisation du blé d’hiver. Cela correspond à une économie d’engrais d’environ 30 CHF/ha pour une fertilisation azotée avec des engrais minéraux.
En Suisse, les méthodes d’exploitation spécifiques aux surfaces partielles doivent être adaptées aux conditions de culture à petite échelle. Une mise en œuvre en collaboration avec des prestataires de services tels que des entrepreneurs agricoles permet de réduire les coûts d’investissement individuels.
Perspectives de développement
Systèmes automatisés avec reconnaissance des plantes individuelles pour la protection des plantes
- ecoRobotix : l’entreprise suisse ecoRobotix AG travaille au développement du robot AVO, qui fonctionne à l’énergie solaire. Le robot phytosanitaire dispose d’une reconnaissance des plantes individuelles et doit pulvériser des herbicides de manière sélective sur les mauvaises herbes. L’utilisation est prévue pour les prairies, les betteraves sucrières, les féveroles et le colza. L’entreprise estime que l’utilisation de ce produit phytosanitaire spécifique au site permettra de réduire les herbicides jusqu’à 95% (ecoRobotix 2020).
Fournisseurs de capteurs et d’outils de culture pour l’exploitation spécifique des surfaces partielles et autres liens utiles
| Produit | Fabricant |
| Systèmes de gestion et d’information agricoles (FMIS) Système d’information géographique (SIG) pour l’analyse des données des machines, des drones et des satellites | Voir l’article « Systèmes de gestion et d’information agricoles (FMIS) dans la production végétale ». QGIS (application gratuite et open source) : www.qgis.org |
| Capteurs pour la détection de la végétation en culture frontale | Capteur Fritzmeier Isaria (désormais disponible en tant que AgXtend CropXplorer) : www.isaria-digitalfarming.com et www.agxtend.com Farmfacts GreenSeeker : www.nextfarming.de Yara N-Sensor (ALS) : www.yara.de |
| Drones | DJI P4 avec capteur multispectral : www.dji.com Leica Geosystems : www.leica-geosystems.com Sensefly : www.sensefly.com Wingtra : www.wingtra.com |
| Images satellites actuelles pour la fertilisation azotée | Les images non traitées et les données brutes peuvent être obtenues directement auprès de l’Agence spatiale européenne (ESA) : https://scihub.copernicus.eu Différents fournisseurs préparent les données de l’ESA, forment les indices de végétation pertinents pour l’agriculture et mettent les données à disposition sous forme de cartes d’application dans les formats ESRI-Shapefile ou ISO-XML lisibles par les machines agricoles : Yara : https://at.farm Solorrow : https://www.solorrow.com/ Vista Talking Fields : www.talkingfields.de Claas Crop View : www.365farmnet.de ou www.barto.ch |
| Cartes de rendement potentiel pour la méthode map-overlay | Vista Talking Fields : www.talkingfields.de |
| Machines agricoles (tracteur, épandeur d’engrais, pulvérisateur) | Pour l’application du Variable Rate Control, la fonction ISOBUS TC GEO est nécessaire : www.aef-online.org Certains fabricants misent également sur des systèmes propriétaires pour la communication, par exemple la société Precision Planting présentée dans la partie supérieure. |
| Échantillonnage du sol spécifique à la surface partielle | En Suisse, www.bodenproben.ch propose l’échantillonnage géoréférencé des sols. Les coordonnées (points d’échantillonnage) peuvent être spécifiées par l’agriculteur. |
| Vérifier la compatibilité ISOBUS | La base de données de l’Agricultural Industry Electronics Foundation (AEF) offre un aperçu des compatibilités ISBOUS des tracteurs et des outils (par ex. épandeurs d’engrais avec VRC) : www.aef-isobus-database.org |
Références
- Borchardt, I., Lubkowitz, C., Kock, C., Schäfer, B., Müller, M. (2018) : Rapport final On-Farm-Research (2007-2017) en collaboration avec le domaine de Helmstorf. Chambre d’agriculture du Schleswig-Holstein, Rendsburg.
- Lorenz, F., Münchhoff, K. (2015) : DLG Merkblatt 407 – Prélèvement d’échantillons de sol et fertilisation spécifiques à certaines surfaces. DLG e.V., Francfort-sur-le-Main.
- Noack, P. O. (2019) : Agriculture de précision, agriculture intelligente, agriculture numérique : bases et champs d’application. Wichmann, Berlin.
- ecoRobotix AG : sous https://www.ecorobotix.com/de/avo-autonomen-roboter (consulté le 07.06.2020)
Glossaire
ISOBUS : ISOBUS est une technologie standardisée pour la communication et le transfert de données entre différents composants agricoles, quel que soit le fabricant. Les composants essentiels sont ici les tracteurs, les outils portés, les terminaux de commande mais aussi le FMIS.
TC GEO : Fonction ISOBUS pour la commande de quantité en fonction de la localisation et la documentation des appareils compatibles ISO
Terminal universel (UT) : Terminal de tracteur pour la commande de différents appareils (outils portés, capteurs)
Système de gestion et d’information agricole (FMIS) : Les FMIS sont des systèmes d’aide à la gestion d’une exploitation agricole, dans lesquels toutes les données et informations sont centralisées et reliées entre elles. Les SIGM ont pour but de soutenir les gestionnaires d’entreprise et de les aider à simplifier les processus opérationnels. Selon leur ampleur, les systèmes comprennent des fonctions relatives à la production végétale, à l’élevage ou à la gestion d’entreprise.
Procédure en ligne et hors ligne : Dans le cas de la méthode en ligne, les paramètres spécifiques au site (indice de végétation ou compactage du sol) sont mesurés en temps réel et une commande de régulation est directement déclenchée sur l’outil porté. Dans le cas de la procédure hors ligne, une carte d’application est créée avant le travail effectif dans le champ et chargée sur le terminal du tracteur.
Méthode de la map overlay : Cette méthode est utilisée pour la fertilisation spécifique à une partie de la surface. Les valeurs des capteurs mesurées en temps réel dans la culture sont comparées à une carte de fond (par exemple le potentiel de rendement) afin d’adapter les valeurs à appliquer en conséquence.
Capteur multi-spectral : Capteur optique permettant de générer des images composées de plusieurs canaux spectraux. Les données multispectrales sont utilisées pour calculer des indices de biomasse pertinents pour la production végétale.
Application à taux variable (VRA) ou contrôle à taux variable (VRC) : Dosage des intrants (engrais minéraux, lisier ou semences) en fonction des conditions spécifiques du site.
Zone de gestion : Subdivision d’une parcelle en sous-parcelles homogènes en fonction des conditions locales
Indice de végétation par différence normalisée (NDVI) : Indice de végétation permettant de distinguer les surfaces sans végétation des surfaces couvertes de végétation
Remarque
Les textes et les images proviennent du média spécialisé « Technologies numériques dans l’agriculture », publié par Edition-lmz SA 2021.
Auteur : Florian Abt